
Fターム[5J084DA09]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 特性図 (306)
Fターム[5J084DA09]に分類される特許
121 - 140 / 306
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
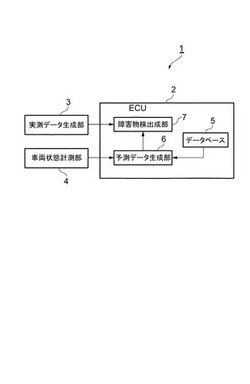
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
受光装置、情報取得装置および物体検出装置

【課題】フィルタの傾きの変化によって生ずる入射光の焦点ずれを抑制することができる受光装置、情報取得装置および物体検出装置を提供する。
【解決手段】情報取得装置1は、レーザ光源11から出射され目標領域から反射されたレーザ光を受光して信号を出力するCMOSイメージセンサ17と、レーザ光をCMOSイメージセンサ17へと導く受光光学系とを備える。ここで、受光光学系は、フィルタ15を具備する。フィルタ15は、レーザ光の進行方向に対して傾けられることにより透過波長帯域がシフトする。さらに、受光光学系は、フィルタ15の傾きの変化に伴う当該フィルタ15内での光路長の変化を補償するための透過板16を具備する。
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
走査型測距装置
【課題】走査効率の高い走査型測距装置を提供する。
【解決手段】投受光部1aから投光された測定光は鏡面2aによって反射され、筐体の透過部6を通過し、測定対象空間に照射される。測定対象空間に測定対象物があると、測定対象物からの反射光は、透過部6を再度通過し、鏡面2aによって反射され、投受光部1aにて受光されることで測定対象物の位置を測定する。また、同時に他方の投受光部1b、鏡面2bでも同様に他の測定対象物の位置を測定することにより測定効率を向上することができる。
(もっと読む)
車両用物体検知装置
【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
ジェスチャ認識に基づく制御装置及び制御方法
【課題】外乱光にロバストで、容易かつ精度良く被検出対象物を検出可能な、ジェスチャ認識に基づく制御装置及び制御方法を提供すること。
【解決手段】本発明に係るジェスチャ認識に基づく制御装置は、検出平面2内に存在する被検出対象物4までの距離を測定するレーザレンジセンサ1と、測定した距離から被検出対象物4の存在位置を検出する存在検出手段と、検出した被検出対象物4の存在位置の時系列データから、被検出対象物4の動きを検出する動作検出手段と、被検出対象物4の動きからジェスチャを抽出する動作解釈手段と、抽出したジェスチャに応じた制御指令を生成して被制御対象機器5へと与えるジェスチャ認識制御手段と、を備える。
(もっと読む)
光学センサシステムにおいて光源に流れる電流の上昇時間を早める高電圧源
光学センサシステムにおいて、高電圧源回路により光源が駆動される。高電圧源により、高電圧出力が、光源のオン期間の開始期間に光源へと供給され、光源に流れる電流の上昇時間が減じられる。光源オン期間の開始の後、高電圧出力が、回路から非接続とされ、電流源が、電流出力を光源へと供給し、その余の光源オン期間の期間、光源を駆動する。  (もっと読む)
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
距離測定装置
【課題】発振器の周波数にゆらぎが生じても、ビートダウンした処理信号間の位相差から距離を測定する。
【解決手段】距離測定装置は、レーザ光束として光周波数コムを発生するレーザ装置1と、基準光27を受光する基準受光部3と、測距光28を受光する測定受光部6とを備える。第1ミキサ31および第2ミキサ32は、測定受光部6および基準受光部3の受光信号と特定の周波数を持つ発振器50の周期信号とを乗算する。第4フィルタ51および第5フィルタ52は、第1ミキサ31および第2ミキサ32で生成された信号成分から異なる周波数成分を抜き出す。第4フィルタ51および第5フィルタ52で抜き出された信号は、第3ミキサで乗算され、差の周波数成分が第6フィルタ54で抜き出される。位相差測定部12は、第6フィルタ54および第2フィルタ11からの2つの処理信号の位相差を測定し、距離測定部17は、その位相差から距離を測定する。
(もっと読む)
距離測定装置
【課題】ターゲットからの複数の散乱光を受光して距離を測定する場合にカウンタ数が多くなり演算処理が複雑化する。
【解決手段】コンパレータ1はレーザ光に伴う送光パルスからスタートパルスを生成し、コンパレータ2はN個のターゲットからの各受光パルスを2値化しNビットデータとして出力する。測距回路5はスタートパルスとNビットデータの内で一番早く“1”となるストップパルス間の時間を計測し基準時間として出力する。遅延線6はターゲットに対する所望の遅延ステップでストップパルスを遅延させた遅延パルスを距離分解能対応の数Mだけ出力する。ラッチ回路7はNビットデータをストップパルスおとび各遅延パルスでラッチし遅延データとして出力する。
(もっと読む)
2D電子光学的画像データに対する3D点群データの登録
二次元画像データセット及び点群データを有する三次元画像の登録のための方法及びシステムについて開示している。本発明の方法は、シーンにおいて地表面を有する点群データの一部を除去するように、三次元画像データを有する点群データの三次元ボリュームをクロッピングするステップと、三次元ボリュームをm個のサブボリュームに分割するステップとにより始まる。次に、その方法は、二次元画像データをエッジ強調するステップを有する。次に、サブボリュームを各々適格化するために、フィルタ処理された濃淡画像を生成し、エッジ強調された前記二次元画像データ及び前記フィルタ処理された濃淡画像に基づいて、二次元相関表面を演算し、前記二次元相関表面のピークを求め、前記二次元画像における前記ピークの対応する位置を決定し、対応点セットを規定し、そして点セットリストにおける前記対応点セットを記憶するステップを有する。最終的には、点セットリストに含まれる複数の相関点セット間の誤差を最小化する変換が決定される。  (もっと読む)
(もっと読む)
場面の内容に基づく点群データの視覚化のための方法及びシステム
色と空間データを結びつけるシステム及び方法が提供される。前記システム及び方法において、場面タグが、場所についての放射測定画像800の部分804のために選択される。さらに、前記放射測定画像データの前記第一の部分に関連する前記空間データ200の部分が選択される。前記場面タグに基づいて、前記空間データの前記部分の色空間関数500、600が選択される。前記色空間関数は、前記空間データの高度座標の関数として、色相、彩度及び輝度(HSIを定義する。)前記空間データの前記部分は、前記空間データの前記部分に基づく前記色空間関数から選択されるHSI値を用いて表示される。前記システム及び方法において、場面タグはそれぞれ異なる区分に関連する。各色空間関数は、関連する区分の前記HSI値における所定の異なるバリエーションを表す。  (もっと読む)
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
距離測定装置および距離測定方法
【課題】コンパクトで、殊に手に持つ形式の距離測定用測定装置によって、使用可能な距離領域、すなわちこの装置による距離測定が可能な距離領域を容易な手段で拡張すること。
【解決手段】送出部と、受信部と、目標対象物までの装置の距離を求める制御および評価ユニットを有している形式のものにおいて、距離測定装置は、ユーザまたは距離測定装置によって設定された測定時間で行われた距離測定の信号ノイズ比の実際値と、ユーザまたは距離測定装置によって設定された距離測定精度から計算された信号ノイズ比の目標値とを比較する手段を有しており、実際値が目標値から偏差している場合には、目標値を得るのに必要な周期数が求められ、周期数を越えて距離測定を行う、または設定された距離測定精度の値を、設定された測定時間内での距離測定が可能になるまで徐々に低くする手段を有している距離測定装置。
(もっと読む)
センサ校正装置、及び、センサ校正方法
【課題】距離画像センサ等の測距センサを適正に且つ簡便に校正する。
【解決手段】センサ校正ECU1は、車両VCの状態及びVC車両が位置している路面SRの状態の少なくとも一方に基づいて、距離画像センサ2が校正可能状態であるか否かを判定する校正可否判定部12、及び、校正可否判定部12によって校正可能状態であると判定された場合に、距離画像センサ2と該車両VCが位置している路面SRとの予め求められた距離(=基準距離)に基づいて、距離画像センサ2を校正する校正実行部13、を備える。
(もっと読む)
距離測定装置及び距離測定方法
【課題】測定装置内部の遅延回路の変動を相殺し、高精度でかつ高速測定が可能な距離測定装置及び方法を実現する。
【解決手段】パルス的に発光する光源部10から、第1基準光r1、第2基準光r2、測定送信光mtを分岐し、光学的変化が略生じない第1参照光路R1を伝播させた第1基準光r1、光学的遅延発生部50が挿入された第2参照光路を伝播した第2基準光r2、測定送信光を測定対象物160に照射して反射して戻ってきた測定受信光mr間の検出時間差を測定することによって測定対象物160との距離を測定する装置及び方法であって、測定受信光mrと第1基準光r1が時間的に分離している場合は、両者の検出時間差から距離を算出し、測定受信光mrと第1基準光r1が時間的に分離していない場合は、第1基準光r1と第2基準光r2の検出時間差Tdと、測定受信光mrと第2基準光r2の検出時間差Td’から距離Lを算出する。
(もっと読む)
高解像度三次元撮像のシステムおよび方法
本発明の実施形態は、広い視野および精密なタイミングを用いた三次元撮像のためのシステムおよび方法を提供する。一側面によれば、三次元撮像システムは、広い視野を有する現場を照射するのに十分な発散で光パルスを放出するように構成される、照射サブシステムを含む。センササブシステムは、場面によって反射または散乱された光パルスの部分を広い視野にわたって受容するように構成され、時間の関数として、受容された光パルス部分の強度を変調し、変調された受容された光パルス部分を形成するように構成される、変調器と、受容された光パルス部分に対応する第一の画像、および変調された受容された光パルス部分に対応する第二の画像を生成するための手段とを含む。プロセッササブシステムは、第一および第二の画像に基づいて、三次元画像を取得するように構成される。  (もっと読む)
(もっと読む)
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
(もっと読む)
121 - 140 / 306
[ Back to top ]