
Fターム[5J084DA09]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 特性図 (306)
Fターム[5J084DA09]に分類される特許
161 - 180 / 306
光照射装置

【課題】光源の電流の許容範囲内で十分な検出器出力を得ることができる光照射装置を提供すること。
【解決手段】サーミスタ116の抵抗値から推定されるLED5の発光点温度に従って減衰器102、111の減衰量を設定する。減衰器102によって光量指示値信号を低下させることによりLED5を電流の許容範囲内で動作させる。また、LED5の光量の低下による位置信号の変化を減衰器111によって補正する。
(もっと読む)
距離測定センサ及びそれを備えた立体カラーイメージセンサ

【課題】基板に垂直に形成されたフォトゲートを備えて光受光領域を拡張した距離測定センサ及びそれを備える立体カラーイメージセンサを提供する。
【解決手段】基板に第1不純物をドーピングして形成され、光を受けて光電荷を発生する光電変換領域と、前記基板に第2不純物をドーピングし、前記光電変換領域を挟んで互いに対向するように離隔して形成され、前記光電荷を集め保存する第1及び第2電荷保存領域と、前記第1及び第2電荷保存領域にそれぞれ対応して前記基板に所定の深さで形成される第1及び第2トレンチと、前記第1及び第2トレンチ内にそれぞれ形成される第1及び第2垂直フォトゲートとを有する。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11で得たプロファイルデータの複数の計測点データ間の境界点位置に、隣接する計測点データ同士が同一領域にあるか否かに応じた状態変数を定義することで、プロファイルデータの任意の領域分割状態を状態空間のうちの一状態として表現し、一状態における領域分割した計測点データ群を最小自乗近似して得た近似線からのばらつき及び類似する領域の連続性を加味した評価関数を用いて、状態空間の中から評価関数を最大とする領域分割状態をMCMCで求め、分割後の領域内の計測点データから幾何的特徴を評価することで、移動ロボットRの前方側を走行可能領域及び走行不能領域に区分けする。
(もっと読む)
速度計
【課題】
高精度な処理を容易に実現する速度計を提供する。
【解決手段】
本発明は、レーザー光源1から移動物体7に入射した光束の散乱光を異なる方向から検出する複数の光検出器12a、12bを備えた速度計であって、光検出器12a、12bの検出信号S1、S2をデジタル化するアナログ/デジタル変換手段と、移動物体7の速度を算出する速度演算手段24aと、検出信号S1、S2の振幅を算出する振幅演算手段24bと、検出信号S1、S2のドロップアウトを検出するドロップアウト検出手段24dと、ドロップアウトの検出時刻を保持する時刻保持手段24eと、信号切替時刻を算出する切替時刻演算手段24fと、複数の速度、振幅、及び、信号切替時刻を記憶する記憶メモリ25と、複数の振幅及び信号切替時刻に基づいて、記憶メモリ25に記憶された速度のうちの一つを選択して出力する出力選択手段26とを有する。
(もっと読む)
反射型光電スイッチおよび物体検出方法
【課題】自己結合型のレーザ計測器を利用して、簡単かつ安価な構成で精度の良い反射型光電スイッチを実現する。
【解決手段】反射型光電スイッチは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段(フォトダイオード2、電流−電圧変換増幅部5)と、干渉波形の情報から、物体10までの距離が基準距離より遠いか近いかを判定する距離判定処理手段(フィルタ部6、計数部7、判定部8)とを備える。
(もっと読む)
効率が向上した測地スキャナ
【課題】本発明は、ターゲットの外観を決定する方法および測地スキャナを提供する。
【解決手続】本発明の方法および測地スキャナでは、初期スキャンが行われ、ターゲット(150)の表面における、多数の予め定めた位置(151〜166)のそれぞれについて、最適なゲイン値の組を算出または決定する。すべての予め定めた位置についてのゲイン値(g151〜g166)が決定されると、ゲイン値を用いて予め定めた位置のそれぞれとの距離が算出される。本発明は、測定速度および全体の効率が向上する点で、好都合である。  (もっと読む)
(もっと読む)
光周波数発生器を用いた絶対距離測定方法及びシステム
【課題】光周波数発生器を用いた絶対距離測定方法及びシステム。
【解決手段】(a)光周波数発生器100を用いて、安定化した異なる複数の波長λiを生成するステップと、(b)周波数走査干渉計200を用いて、測定する距離の初期推定値を取得するステップと、(c)取得した初期推定値の不確度の範囲を分析するステップと、(d)多波長干渉計によって各波長λiに対する干渉信号を解析して、各波長λiに対する小数部εiを測定するステップと、(e)初期推定値の不確度の範囲内で、各波長λiに対する整数部miを決定するステップと、(f)上記異なる複数の波長λiに対するそれぞれの小数部εi及び整数部miを用いて、測定する距離の絶対距離Lを測定するステップとを含む。
(もっと読む)
移動体配置計測システム及び移動体搭載システム
【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
投影装置及び投影制御方法
【課題】装置の小型化に寄与し、より簡易な構成で高い精度の測距を実行可能とする。
【解決手段】光源ランプ28と、多数の微小ミラーの光源ランプ28からの光に対する各傾斜角度を制御して反射光により光像を形成するミラー素子26を駆動し、光像を投影レンズ部12を介して投影する投影系24〜34と、光源ランプ28とは別に設けられ、微小ミラーが光源ランプ28からの光を投影レンズ部12の外部に反射させる傾斜角度の状態で微小ミラーへ変調光を入射させ、その反射光が投影レンズ部12を介して出射するように配置したレーザ発光部32A〜32Cと、レーザ発光部32A〜32Cの発光で投影対象から得られる反射光を受信するレーザ受光部13と、レーザ発光部32A〜32Cの発光とレーザ受光部13の受光の位相差により投影対象までの距離を測定し、測定した距離により投影系24〜34での投影条件を制御するCPU35、メインメモリ36及びプログラムメモリ37とを備える。
(もっと読む)
測距装置
【課題】背景光による測定誤差の少ない少数ロットのシステムを安価に組み立てられる測距装置を提供する。
【解決手段】発光ダイオード11から出力した検知光を測定対象A1に向かって射出し、検知光の反射光をレンズ13で収束してリニアセンサ14の検知面14aに収束スポットSPを形成させる。演算素子15は、リニアセンサ14からシリアルデータで出力される102個の受光素子18のそれぞれの受光量の数値データを用いて収束スポットSPの受光量ピークを識別して、測定対象A1までの距離を演算し、演算結果を出力端子OUT1〜OUT4を通じて4ビットのパラレルデータで出力する。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 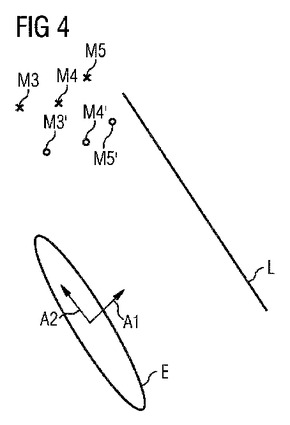 (もっと読む)
(もっと読む)
対物距離計測方法及び装置
本発明に係る方法は、計測対象物(20)までの距離(d)を計測する方法であり、発光器(12)からビーム光(18)を出射するステップと、計測対象物(20)で反射されたビーム光(24)を受光器(14)に入射するステップと、その出射(18)から入射(24)までのビーム光伝搬時間から距離(d)を求めるステップと、ビーム光(18)の出射に際し方形波変調信号(66,74)に従いそのビーム光(18)を振幅変調するステップと、を有する。使用する方形波変調信号(66,74)は、それぞれ複数個の方形パルス(68,68’)からなる複数個の方形パルス群(76,76’)を含む信号(66,74)である特に、本方法では、それら方形パルス群(76,76’)間の時間間隔(PA)を変動させると共に、それらの方形パルス群(76,76’)内の方形パルス(68,68’)の個数を変動させる。 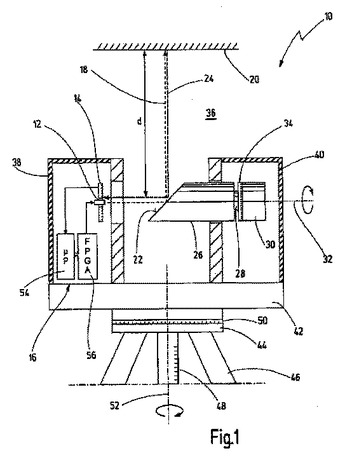 (もっと読む)
(もっと読む)
測距双眼鏡
【課題】対象物までの距離を測定可能で、焦点調節及び視度調節等の双眼鏡の基本的な機能を損なわずに小型化した測距双眼鏡を提供すること。
【解決手段】接眼レンズ、対物レンズ並びに第1プリズム及び第2プリズムから成る正立プリズムを有する一対の光学系と、ビーム分割面を有し、かつ前記第1プリズム及び第2プリズムの間に配置されるビームスプリッタと、対象物にレーザーを放射する発光部と、対象物から反射したレーザーが入射する受光部と、レーザーが前記受光部に入射することにより対象物までの距離を算出する演算手段と、前記演算手段で算出された結果を表示する測定結果表示手段と、前記一対の光学系、前記ビームスプリッタ、前記発光部、前記受光部、前記演算手段及び前記測定結果表示手段を内蔵する筐体とを備えることを特徴とする測距双眼鏡。
(もっと読む)
計測装置および計測方法
【構成】 計測装置10はコンピュータ12を含み、コンピュータ12には複数のレーザーレンジファインダ14が接続される。複数のレーザーレンジファインダ14は、或る環境に配置され、コンピュータ12は、レーザーレンジファインダ14の検出結果に基づいて人を追跡する。たとえば、コンピュータ12は、パーティクルフィルタを用いて、人の位置および移動速度を推定し、胴体および両腕を3つの円で組み合わせた人形状モデルを用いて、人の身体の方向と腕の動きとを推定する。
【効果】 比較的少ない計算量で正確に人を追跡することができる。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】正確に床検出を行うことが可能な障害物検出システム及び移動ロボットを提供すること。
【解決手段】本発明にかかる障害物検出システム100は、距離画像データを生成する距離画像センサ1と、前記距離画像データに基づいて障害物を検出するデータ処理部2とを備えている。データ処理部2は、距離画像センサ1により生成された距離画像データより得られる反射光強度と、距離画像センサ1によって生成された距離画像データによる距離に基づいて、障害物を検出する。
(もっと読む)
レーザースキャナのキャリブレーション装置及びキャリブレーション方法
【課題】特殊な機器を使用することなくレーザースキャナのキャリブレーションを行う技術を提供する。
【解決手段】左右両側辺が平行かつ垂直な垂直平面S1を有するターゲットを、垂直平面S1の前方の計測原点Omからレーザースキャナ1により水平走査し、M個の測点に対する点群データを得る。有効測点抽出部13は、この点群データの中から、垂直平面S1の左右両側の端部の端測点A,Bを特定し、端測点A,B間のm個の有効測点Piの相対座標を抽出する。座標決定手段14は、光軸の軌跡が垂直平面S1を切る線(走査線E1E2)を基準に測地座標系を設定し、端点E1から端測点Aまでの距離dA、端点E2から端測点Bまでの距離dB、及び端測点A,B以外の各有効測点Piから走査線E1E2までの距離diの自乗和が最小となるように、相対座標を前記測地座標へ関係づける関係パラメータを決定する。
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
白線検出装置
【課題】低負荷かつ高精度に道路面上の白線を検出する白線検出装置を提供することを課題とする。
【解決手段】道路面に描かれた白線を検出する白線検出装置1であって、電磁波を送信し、当該送信した電磁波の反射波を受信する電磁波送受信手段2と、その電磁波の送信及び受信に基づいて検出点までの距離を算出する距離算出手段2と、検出点までの距離に基づいて道路面を推定する道路面推定手段6と、道路面と推定された各検出点に対する電磁波の送信強度と受信強度に基づいて白線を検出する白線検出手段6とを備えることを特徴とし、同一の検出点に対する電磁波の送信強度と受信強度及び距離に基づいて当該検出点での反射率を算出する反射率算出手段6を備え、白線検出手段6は、道路面と推定された各検出点での反射率に基づいて白線を検出すると好適である。
(もっと読む)
画像センサデータに距離センサデータをマッピングする方法及び装置
第1の距離センサ(3(1))からの第1の距離センサデータをカメラ(9(j))からの画像データにマッピングする方法及び装置。当該方法は、モバイル・システムに搭載された位置判定装置からの時間データ及び位置データと、モバイル・システムに搭載された少なくとも第1の距離センサ(3(1))からの第1の距離センサデータと、前記モバイル・システムに搭載された少なくとも1つのカメラ(9(j))からの画像データとを受信する工程と、第1の距離センサデータ内で、少なくとも1つの物体に関連する第1の点群を識別する工程と、第1の点群に基づいて物体に関連するマスクを生成する工程と、少なくとも1つのカメラ(9(j))からの画像データ内に存在するのと同一の物体に関連する物体画像データ上に、マスクをマッピングする工程と、物体画像データの少なくとも一部分に対して、予め定められた画像処理技術を実行する工程とを含む。  (もっと読む)
(もっと読む)
161 - 180 / 306
[ Back to top ]