
Fターム[5J084DA09]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 特性図 (306)
Fターム[5J084DA09]に分類される特許
61 - 80 / 306
姿勢検出装置
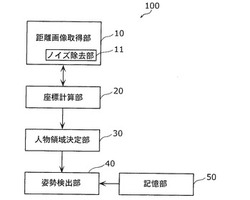
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器

【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
レーザ密度分布推定装置、レーザ密度分布推定方法、及びプログラム
【課題】森林域の地形の航空レーザ計測において、地表へ到達するレーザの密度が樹木密集度や地表の傾斜に応じて受ける影響を評価する。
【解決手段】林分収穫表に示される樹木の属性(樹種・樹齢)別の標準密度に基づいて、樹間距離を推定する(S64)。レーザの地表への到達率をシミュレーションし、樹木からの距離に応じた到達率関数を属性別に求める。樹間距離と到達率関数とから各属性の植生域の樹木一本当たりのセル内のレーザ到達率を求める(S66)。森林計画図から林班等の属性を取得し、対応する属性のセル内レーザ到達率に基づいて、当該林班等における到達レーザ密度を定める(S68)。また、標高データ48から傾斜区分図50を生成し(S72)、到達レーザ密度に対して傾斜補正を行う(S70)。
(もっと読む)
車両用物体判定装置
【課題】自車20が旋回するときにも連続路側物を的確に検出する。
【解決手段】車両用物体判定装置10では、物体検出部13が、レーザ光の走査により前方物体情報を取得するとともに、進行軌跡予測部14は、旋回角センサ11からのヨーレート等や車速センサ12からの車速に基づき旋回進行軌跡32を算出する。物体判定部15は、自車20が直進中か旋回中かを判断して、旋回中は、旋回進行軌跡32に対して左右別々に判定エリア33L,33Rを設定する。そして、同一の判定エリアに存在する物体同士に限定して、それらが同一の連続路側物列の物体であるか否かの判定対象とする。具体的には、判定エリア33R内の物体をy座標位置を小さい順に番号付けし、番号が隣り同士の物体間のy軸方向距離を算出し、その平均値Baを算出し、Baと物体間のy軸方向距離との対比に基づき、各検出物体に対して連続路側物であるか否かを判定する。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
距離センサのキャリブレーション装置、キャリブレーションプログラムおよびキャリブレーション方法
【構成】 計測装置10はコンピュータ12を含み、コンピュータ12には複数の距離センサ14が接続される。コンピュータ12は、各センサ14からの出力に基づいて、センサ14毎に人観測点を検出し、その人観測点の時間変化から人間の移動軌跡を算出する。次に、各センサ14の出力に基づいて算出された移動軌跡を、センサ14間で一致させる。一致させた移動軌跡上の2つの人観測点が所定のルールに従って抽出され、それらを用いてこの移動軌跡を生成したセンサ14間の距離および相対的な角度についてのセンサ間の制約を、移動軌跡が一致されたセンサ14の組毎に算出する。そして、センサ間の制約を用いて、全センサ14の位置および向きを推定し、推定した位置が調整される。
【効果】 初期値を与えなくても、或る環境に配置した複数の距離センサの位置および向きをキャリブレーションすることができる。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】目標に対して精度よく光波を照射し得る。
【解決手段】実施形態によれば、照射部にて移動目標に対し光波を照射し、光波の反射光を撮像部にて受光して撮像視野内の移動目標に関する画像情報を得て、この画像情報に基づいて駆動部にて光波の照射方向と移動目標からの光波の反射方向とを一致させるべく照射部及び撮像部を駆動して移動目標を追跡する目標追跡装置において、照射部から光波の照射方向に対応する照射部の姿勢情報を取得する取得手段と、この取得手段で得られた姿勢情報と、撮像部で得られる画像情報とに基づいて光波の照射方向と撮像部の指向方向との間の偏向角誤差を算出する演算手段と、この演算手段で求められた偏向角誤差に基づいて、光波の照射方向と撮像部の指向方向との間の偏向角を補正すべく駆動部を制御する制御手段とを備えた目標追跡装置を提供する。
(もっと読む)
ホーム事故検知システム
【課題】駅ホーム上で事故を高い精度で迅速かつ確実に自動的に検知して警報を発し、駅ホーム上で駅員の在・不在、駅ホームの混雑度に応じて自動警報を行えるホーム事故検知システムを提供する。
【解決手段】このホーム事故検知システムは、駅ホームの縁に沿って設置され、計測時刻毎に検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像の状態に係るデータを記憶する記憶手段41と、記憶手段に記憶された旅客像の状態に係るデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客像に対応する旅客に事故が発生したと判定する処理手段52と、事故発生と判定のとき自動的に警報を発する警報手段と、駅ホームに駅員が居るか否かを判定し、警報手段を自動警報不能または自動警報可能にする駅員監視手段(62,64,65)とを備える。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備えている。フォトゲート電極PGは、光入射面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から裏面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから迅速に対象物体の種別を推定し、また、障害物の大きさや移動の向きを把握できるようにする。
【解決手段】矩形推定部6により、レーザレーダ2に対する対象物体の移動により変化する検出パターンが対象物体の横方向の長さおよび縦方向の長さのいずれであるかを推定し、物体属性推定部7により、推定した前記幅および前記長さの少なくともいずれか一方から、1フレームの検出パターンからでも迅速に対象物体の種別を推定し、対象物体の全体の大きさや移動の向きを知ることもできるようにする。
(もっと読む)
物体検知システム及び方法
【課題】レーザセンサから照射されるレーザビームが障害物に遮断されて物体が一時的に未検知となっても、連続性を以て同一の物体を特定する。
【解決手段】監視領域にて物体の探索をする探索空間、及び物体を検索する所定の単位のマス目からなる検索グリッドの数を物体毎に設定しておき、得られる測距データから監視領域内に存在する物体を経時的に測距する。障害物によりレーザビームが遮断されて、物体が一時的に未検知となった場合、探索空間にレーザビームを照射して物体を経時的に探索する。探索による物体の探索の対応を経時的に取りながら物体の位置の検索及び追跡し、この追跡により得られるデータを用いて、物体の軌跡を表示する。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
測距装置および電子機器
【課題】測距と同時に方向検知を可能とする測距装置を提供する。
【解決手段】測距装置は、第1の発光素子105aおよび第2の発光素子105bと、受光素子106と、演算部110とを有する。演算部110は、受光素子106の光強度分布において、強度が最も強くなる地点を最大ポイントと定義し、光強度分布の両端を第1の最端ポイントおよび第2の最端ポイントと定義したとき、最大ポイントと第1の最端ポイントとの間の距離と最大ポイントと第2の最端ポイントとの間の距離との比率に基づいて、被検出物までの距離と被検出物の移動方向とを演算する。
(もっと読む)
61 - 80 / 306
[ Back to top ]