
Fターム[5J084DA10]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | その他 (32)
Fターム[5J084DA10]に分類される特許
1 - 20 / 32
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
歩行者検出装置

【課題】的確に歩行者を検出する歩行者検出装置を提供する。
【解決手段】3次元位置情報取得部11は、車両の周辺の3次元位置情報を時系列順に取得する。解析部12は、各時刻における前記3次元位置情報を車両が位置する平面上の点群として表現し、時系列に沿ってその点群の分布変化の周期性を解析する。解析部12により周期性があると判定された際には、その点群を歩行者として検出する。
(もっと読む)
高速サンプリング装置を用いた目標検出装置および方法
【課題】高速サンプリング装置を用いた目標検出装置および方法を提供する。
【解決手段】目標検出の装置および方法であって、警備および監視の用途における目標検出の精度および速度を、論理回路を用いて向上させる装置および方法である。論理素子として、市販のフィールドプログラマブル・ゲート・アレイを用いることが可能である。一実施形態では、フィールドプログラマブル・ゲート・アレイのマルチギガビット・トランスファー(MGT)ポートが、外部クロックにロックされる。MGTポートを外部クロックに結合すると、装置をオーバーサンプリング・モードで使用しなくても、受信信号をサンプリングするレートを高めることができる。これにより、フィールドプログラマブル・ゲート・アレイが、実際の転送レートの少なくとも8倍の速度でサンプリングすることが可能になり、これによって、目標検出の速度および精度が向上する。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
物体検知システム及びその方法
【課題】
レーザセンサによる測距の対象物からの反射光が十分でない場合でも、領域内の物体の存在を検知する。
【解決手段】
レーザセンサを用いて領域の背景に相当する物体の情報を背景データとして取得すし、レーザセンサを用いて領域内にある物体の測距データを取得し、取得した測距データと背景データの差分を計算して物体の存在位置を算出し、物体の形状を連続する座標値であるポイントデータとしこれに近接した周辺ポイントデータの中心座標であるクラスタを検出し、このクラスタのデータを用いて領域の物体の存在位置を検出する。また、測距データが得られない場合でも領域内の物体の存在を検知し、物体が特定の領域に進入した場合に警報を発する。
(もっと読む)
投影装置及び光測距方法。
【課題】 投影装置から投影面上までの距離を迅速且つ高精度に測距出来る投影装置及び光測距方法を提供する。
【解決手段】 入力された映像データに基づいて映像を投影表示させる映像表示制御部53と、前記映像表示制御部53により映像が投影表示される投影面にレーザーを照射させて、前記投影面までの投影距離を取得する投影距離取得部14と、を備え、前記映像表示制御部53は、前記投影距離取得部14により前記投影距離が取得される際に、少なくとも前記レーザーが照射される領域としてのレーザー測距点63に対応する第一映像領域66の表示状態を、前記投影距離を取得するための表示状態に調整する投影装置。
(もっと読む)
測距装置
【課題】 短い検出時間で正確且つ簡単に対象物までの距離を測定可能な測距装置を提供する。
【解決手段】 転送時において、外光の強度が高いほど、転送電圧の大きさを小さくすると、障壁高さが高くなり、より多くの電荷量のキャリアが、第1及び第2ポテンシャル井戸φCD1、φCD2内に残留する。単位期間は、外光の強度に依存しないで設定される。外光の強度が高いほど、多くのキャリアが残留し、最終的に読み出されるキャリアから除去される。外光が強ければ、単位期間当りの転送回数が増加し、第1及び第2ポテンシャル井戸φCD1、φCD2内に蓄積されるキャリアが飽和する前に、転送が行われる。外光が弱ければ、単位期間当りの転送回数が減少し、余分な転送を行わないことで、単位時間当たりの蓄積電荷量を増加させ、短い検出時間において検出精度を向上させることができる。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。フォトゲート電極PG直下の領域は、電界集中領域1Gからなる。
(もっと読む)
計測装置およびその計測方法
【課題】被検物の全体3次元形状を測定する計測装置、およびその計測方法を提供することを目的とする。
【解決手段】本発明に係る計測装置1は、被検物170を載置する支持ステージ151と、支持ステージ上に載置された被検物の3次元形状を光学的手法を用いて非接触で測定する測定部2とを備えており、測定部は支持ステージに対して測定方向が可変となるように構成され、また、予め設定した所定の位置関係で支持ステージ上に載置された少なくとも3つ以上の測定基準体160、161および162と、測定部により複数の測定方向から支持ステージ上に載置された測定基準体および被検物を測定し、得られた測定データから測定基準体の測定位置を合成基準として複数の測定方向からの被検物の測定データを合成することにより、被検物の全体3次元形状を求める合成部とを有している。
(もっと読む)
ビーム照射装置
【課題】2軸駆動方式のビーム照射装置において、目標領域におけるビームの照射位置を、簡素な構成にて円滑に検出できるようにする。
【解決手段】ミラーホルダ10の支軸12の端部にレーザチップ50を配置し、レーザチップ50からのレーザ光を受光するPSD60をベース300側に配置する。こうすると、ミラー面の傾き状態がレーザ光の出射方向にダイレクトに反映される。よって、これを受光するPSD60からの出力をもとに、ミラー13の回動状態を精度良く検出でき、その結果、ビームスキャン位置の検出精度を高めることができる。また、支軸12の端部に小さなレーザチップ50を配する構成であるため、ミラーホルダ10に付加される構成を極めて簡素かつ小型化することができる。よって、ミラーホルダ10の構成の簡素化と、ミラー13の駆動レスポンスの向上が図られる。
(もっと読む)
位置検出用受光素子およびその製造方法およびセンサおよび電子機器
【課題】測距対象物までの距離に比例する出力が正確に得られる位置検出誤差の少ない位置検出用受光素子を提供する。
【解決手段】N型基板1と、N型基板1表面に形成されたP型抵抗層8と、P型抵抗層8の両端側にそれぞれ接続された2つの第1アノ−ド電極4と第2アノ−ド電極5とを備える。N型基板1とP型抵抗層8とから受光部9を構成し、受光部9に入射する入射光位置に応じた光電流が第1アノ−ド電極4と第2アノ−ド電極5から出力される。P型抵抗層8は、第2アノ−ド電極5から第1アノ−ド電極4に向かって不純物濃度が高くなるよう配置された5個の異なる不純物濃度の抵抗部8a〜8eからなり、抵抗部8a〜8eの隣り合う境界部分は、不純物濃度の高い側の抵抗部の不純物濃度以下で、かつ、不純物濃度の低い側の抵抗部の不純物濃度以上である。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】センサヘッド部の設置に際して、ワークに対して正確な位置調整を可能とする。
【解決手段】測定対象物からの反射光を受光して、第1の方向の各位置における受光信号として出力するための2次元受光素子と、2次元受光素子からの受光信号を増幅するための増幅器と、投光部からの照射光の反射光により、第1の方向の各点において増幅器で得られた増幅信号に基づき、測定対象物のプロファイル形状を演算可能なプロファイル演算手段と、プロファイル演算手段で演算された測定対象物のプロファイル形状を表示可能な表示部と、プロファイル形状を表示部で表示された状態で、所望の計測領域を指定するための計測領域指定手段と、領域指定手段で指定された計測領域に対して所望の演算を行うことが可能な計測処理部とを備える。
(もっと読む)
移動物測定システム
【課題】
領域内に移動物が立ち止る位置及びその位置における停止時間を自動的に測定する。
【解決手段】
領域内で移動物が停止する位置を検出する位置検出手段と、位置で移動物が停止した時間を算出する時間算出手段と、位置検出手段によって検出された位置情報と時間算出手段によって検出された時間情報を関連付けて記憶するデータ記憶手段と、記憶手段から位置情報と時間情報を読み出し、領域内の位置に対応する時間情報を統計処理する統計処理手段と、統計処理手段によって処理された情報を領域内の位置に関連付けて表示する表示処理手段と、を有する。
(もっと読む)
プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム
【課題】スクリーンの傾き計測の精度を向上させ、プロジェクタを小型化する。
【解決手段】投影部16の光源部165は、内蔵するLEDに供給する電流をAM変調し、投影部16は、光強度を変調した投影光をスクリーンに投影する。受光部171は、光強度が変調された反射光を遅れて受光する。この時間遅れは、光の飛行時間に相当する。演算部173は、スクリーン上の複数の測距点について、光強度が変調されている投影光と反射光との位相のずれ量を取得し、この位相のずれ量に基づいて、スクリーン上の複数の測距点までの距離を取得し、スクリーンの傾き角度を取得する。位相のずれ量に基づいて、スクリーンの複数の測距点の距離を取得するため、三角測距法と比較して精度は向上する。また、測距専用の光源も不要となり、プロジェクタ1は小型化される。
(もっと読む)
レーザ光照射測定装置
【課題】
照射レーザ光のみをガルバノミラーによって走査し反射光をそのまま受光器で受光する装置の場合でも、レーザ光の強度制御において制御に遅れが発生せず、又は外乱光の影響を受けにくく、測定精度の高いレーザ光照射測定装置を提供することにある。
【解決手段】
受光器の受光面から反射する受光面反射光を集光する集光レンズと、集光レンズにより集光された受光面反射光の受光量を検出するフォトセンサと、フォトセンサによって検出された受光量に応じてレーザ光照射器から対象物に照射されるレーザ光の光量を補正するレーザ光量補正手段とを備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】ビームを高速に走査する場合にも角度精度の高い計測を実現する。
【解決手段】送信する波動を送信ビームにすると共に、観測対象とする反射物体からの反射波の到来方向を送信ビームの放射方向と一致させてビーム走査を行い、得られた反射波を受信ビームを用いて、配列した複数の受信素子のいずれかで受信し、ビーム走査速度と反射物体の仮定距離に基づいて送信ビームとその反射波の角度差を算出し、その角度差に応じて複数の受信素子の中から受信ビームを受信した受信素子のみを選択してその受信信号を得る。
(もっと読む)
光波妨害システムとその光波妨害方法
【課題】妨害状況の誤判定を低減し、より確実に妨害処理を実施する。
【解決手段】第1の妨害装置Aで目標を妨害している状態で、受光装置A25の受光信号から反射光の有無を判別し、反射光が得られる間は第1の妨害装置Aに妨害処理を継続させる。反射光が得られなくなったことが判別されたとき、第1の妨害装置Aの画像処理部A14で得られている捕捉・追尾情報を第2の妨害装置Bの画像処理部B14に転送し、目標捜索及び捕捉・追尾を引き継がせる。目標捜索の結果、目標が検出されなかった場合には目標妨害が完了したと判断し、目標の捕捉・追尾が完了して妨害が開始された場合には、受光装置B25の受光信号から反射光の有無を判別し、反射光が得られている間は第2の妨害装置Bに妨害処理を継続させる。反射光が得られなくなったことが判別されたとき、目標の妨害が完了したと判断し、一連の処理を終了する。
(もっと読む)
物体検出装置
【課題】複数種類のセンサを組み合わせてそれぞれ同じ物体を検出する物体検出装置において、物体がそれらセンサの検出可能範囲をまたがって移動した場合であっても同一物体として検出し続けること。
【解決手段】一方の物体検出方式で検出していた物体が消失した場合、その消失した位置及び物体の移動方向によって、他方の物体検出方式がカバーする物体検出範囲に移動したか否かを判定する。そして、その物体が他方の物体検出方式がカバーする物体検出範囲に移動したと判定した場合には、それまでの物体検出方式によって検出された物体の消失する直前の情報を初期情報として参照し、他方の物体検出方式はその物体の検出を続行する。
(もっと読む)
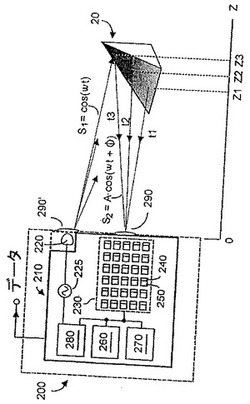
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するためのシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
固体撮像素子を用いた三次元画像取得方法
【課題】従来より知られた固体撮像素子を用いてコスト高を招来することなく、十分に実用になる三次元画像を取得する。
【解決手段】画素が所定の方向と上記所定の方向とは直交する方向とに沿って2次元マトリクス状に配置された固体撮像素子により、被写体に照射された光の上記被写体からの反射光を受光して上記被写体の三次元画像を取得する固体撮像素子を用いた三次元画像取得方法において、被写体に対して第1の所定時間間隔でパルス状に光を照射し、上記被写体からの反射光を所定の方向に沿った画素群毎に、上記所定の方向とは直交する方向に沿って第2の所定時間間隔を開けて順次に受光してストライプ状の三次元画像を取得する。
(もっと読む)
1 - 20 / 32
[ Back to top ]