
Fターム[5J084EA17]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 保守、点検 (22) | 汚れ検知 (17)
Fターム[5J084EA17]に分類される特許
1 - 17 / 17
レーザレーダシステム,及び取付方法

【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
走査形レーザ距離センサ装置

【課題】対象物の反射率が低い場合でも、確実にはみ出しを検知する走査形レーザ距離センサ装置を提供する。
【解決手段】パレットまでの距離をあらかじめRAM11に記憶する。車両を入庫し、入庫ボタン36を押すことにより、制御回路10は走査形レーザ装置を起動して反射物体までの距離を測定する。車両があるときの測定結果と、RAM11の記憶した距離とを比較し、異なる場合、検知信号を出力する。
(もっと読む)
物体検出装置
【課題】光学窓の汚れを検出するための受光素子を設けることなく、光学窓の汚れを検出できるようにする。
【解決手段】鉛直下方向を含む面内を走査するようにレーザー光の向きを変化させて光学窓を介して照射するとともに、レーザー光が物体に反射した反射光を光学窓を介して受光するレーザーセンサ10を備え、レーザー光の照射方向を鉛直下方向に変化させて、路面に反射した反射光が検出されたか否かに基づいて光学窓の汚れを判定する(S202〜S216)。
(もっと読む)
障害物検知装置
【課題】表面状態の検出を可能とし得て、しかも、障害物とレーザとの間に設けた出射面の表面状態をリアルタイムに検出することができ、その表面状態に対応したレーザ光を照射する障害物検知装置を提供する。
【解決手段】本発明は、レーザ光源2と、レーザ駆動部3と、レーザ光源2から照射されたレーザ光をビーム偏向するビーム偏向素子4と、電圧制御部5と、出射面9と、受光面10と、検出器7と、コントロール部6と、を備え、ビーム偏向素子4の偏向角の一部のレーザ光を利用して出射面9の表面状態を計測するように出射面9に対して斜めから入射する反射ミラー11,12,13と、出射面9で反射したレーザ光を受光する検出器8と、を備え、コントロール部6は、電圧制御部5での電圧制御により出射面9の表面状態を計測した後に出射面9を透過する前方検出用のレーザ光を出力する。
(もっと読む)
光学式センサ汚損防止装置
【課題】汚れ防止のために光学式センサの前方に発生させるガスの流量を、汚損物サイズに応じて変化させることが可能な光学式センサ汚損防止装置を提供すること。
【解決手段】光学式センサ10の前方にガス流SBを発生させるガス流発生手段30を備える構成とし、光学式センサ10の前方を飛来する汚損物Pの大きさを検出する汚損物サイズ検出手段10を設ける。検出された汚損物Pの大きさに応じて、ガス流発生手段30によるガス流SBの流量を変化させるガス量調節手段20,30を備える構成とする。そして、汚損物Pのサイズが大きい場合に、ガス流SBの流量を増加することで、汚損物Pが光学式センサ10に付着することを防止する。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
光測距装置
【課題】光を透過させる投受光窓を介して、測定対象物に向けた投光及び測定対象物からの反射光の受光を行って、前記測定対象物までの距離を測定する光測距装置において、前記投受光窓の汚れを、簡易な構成で高精度に検知できるようにする。
【解決手段】距離値算出部101での測距結果、及び、受光光量レベルを入力する汚れ検知部107において、投受光窓6までの距離に相当する測距値を得た場合に、当該測点に対応する投受光窓6の領域に汚れが付着していると判断し、かつ、当該測定における受光光量レベルから汚れの濃度を検出する。そして、前記汚れの付着が判断された測点と該測点での汚れ濃度とから汚れレベルを判断し、汚れレベルに基づいて、警告装置108、投受光窓上の汚れを除去する除去装置109を動作させ、また、測点位置・投光強度・受光感度の変更などの測距動作の補正を行う。
(もっと読む)
トランジットタイム原理に基づいて動作する光学センサ
【課題】トランジットタイム原理に基づいた光学センサに関し、仕切りスクリーンの検査を可能にする光センサの提供。
【解決手段】光学センサは、発光パルスを観察領域に放射するための光源と、前記発光パルスのビーム方向を、回転させるための回転装置と、前記観察領域における対象物により反射された光パルスを検知するための検知器と、前記センサの内部を周囲環境から離隔しておくための、透明な仕切りスクリーンを含むハウジングと、前記仕切りスクリーンの透光性をテストするためのテスト装置と、前記光源を制御し、前記検知器により検知された前記光パルスを評価し、且つ、対象物からの距離を、前記光パルスの測定されたトランジットタイムに基づいて決定するための、前記テスト装置と協働する制御及び評価ユニットとを含む。
(もっと読む)
光走査型光電スイッチ及びこれを組み込んだ外乱光表示装置
【課題】投受光に伴う光と外乱光とを区別して、受光した光が外乱光であると判別して外乱光の方位を特定する。
【解決手段】パーソナルコンピュータ(PC)によって光走査型光電スイッチ(1)の動作が常時モニタされているとき、光走査型光電スイッチ(1)のシンボル(S)から上方に扇状に広がるハッチングを付した領域に数多くの外乱光が見られ、この外乱光はシンボル(S)から放射状に延びる直線で表示される。投光タイミングと受光タイミングとの時間差tによって距離を計測し、また、受光した光軸番号によって方位を検知する。時間差tが非常に小さいときには外乱光であるとみなすことができる。
(もっと読む)
レーザ距離測定装置及びその遮蔽物検出方法
【課題】距離測定用の投受光装置を用いて距離測定に影響する遮蔽物の存在を検出することができるレーザ距離測定装置及びその遮蔽物検知方法を提供する。
【解決手段】照射窓Wを介してレーザ光Lを照射するとともに物体からの反射光Rを受光して測定範囲内の物体の距離を測定するレーザ距離測定装置であって、レーザ光Lの発光と同時に発光同期信号Slを発信する投光部1と、反射光Rを受光して受光信号Srを発信する受光部2と、照射窓Wから測定範囲の間に設定される遮蔽物検出位置Xに相当する距離からの受光信号Sxを発光同期信号Slに基づいて選択する受光信号選択部3と、選択された受光信号Sxに対応した投光条件を関連付けて計測データDxを発信する遮蔽物検出用信号処理部4と、計測データDxから物体の形状を算出して遮蔽物の存在を検出する遮蔽物検出部5と、を有する。
(もっと読む)
車両用レーザレーダ装置および車両用レーザレーダ装置の汚れ判定方法
【課題】 降雨時における送光窓の汚れ誤判定を低減でき、車間距離の測定に依存する車両制御を継続することができる車両用レーザレーダ装置を提供する。
【解決手段】 CPU12は、送光窓2の外部に付着した汚れにより送光窓2から内部へ反射散乱されたレーザ光を受光素子6が受光した場合、その受光量がしきい値以上であるとき、レーダ装置に許容量以上の汚れが付着したと判定する汚れ判定手段と、降雨中であるか否かを判断する降雨判断手段と、降雨中であると判断された場合、しきい値をより高い値に変更するしきい値変更手段と、を備える。
(もっと読む)
車両による視界影響現象の検出方法及び装置、並びにそのコンピュータプログラム
【課題】車両の安全な走行に影響を与える虞のある水しぶきや接近している後続車両等の障害物を検出して、ドライバを支援する視界影響現象の検出方法及び装置を提供する。
【解決手段】障害物(O)により反射される光ビーム(FX1)を第1光源(SRC1)から放射し、参照光ビーム(FX2)を第2光源(SRC2)から放射し、障害物(O)で反射された反射光ビーム(FX1_R)と、直接入力される参照光ビーム(FX2)をレシーバ(RCV)で受け、反射光ビーム(FX1_R)及び参照光ビーム(FX2)に基づき、1以上の検出信号(SD)を生成し、この検出信号(SD)と参照データ(IR)を比較する。第1光ビーム源(FX1)及び参照光ビーム(FX2)は、赤外線であり、車両(V)の後方へ放射される。
(もっと読む)
TOFレンジカメラにおける汚れ検出方法
シーンからの反射光を、光インターフェースを通して、画素のアレイをもつイメージャセンサ上に受取する飛行時間(TOF)レンジ画像化システムにおける汚れ検出方法が記載される。当該方法では、センサ画素に対して距離情報と振幅情報を特定するが、光インターフェース上の汚れの存在を、センサ画素に対して特定する振幅情報に基づいて特定する。  (もっと読む)
(もっと読む)
光学装置
【課題】ハウジングの透光窓のうち、光学系により投受光される光が通過する通過領域の汚損の有無を的確に検出すると共に、その他の領域に付着した異物によって前記通過領域における汚損の有無の検出が阻害されることを回避する。
【解決手段】周壁部2に透光窓3を有するハウジング4の内部に、透光窓3を介して光を投受光する光学系5と、透光窓3を介して対向配置された投光器6および受光器7と、投光器6から透光窓3を通過して受光器7に至る光に基づいて透光窓3の汚損の有無を検出する汚損検出部8とを備えた光学装置1であって、透光窓3を上下方向に沿う姿勢又は上端が下端よりも外側に位置する傾斜姿勢で配置し、周壁部2に透光窓3の上端又はその上方で透光窓3よりも外側に突出する突出部2aを設け、投光器6および受光器7のいずれか一方を突出部2aに、他方を透光窓3の上端よりも下方における透光窓3の内側にそれぞれ配置した。
(もっと読む)
レーザ測定のデバイスおよび方法
レーザレーダ66などの測定デバイスは、遠隔プローブボリュームに放射を送信するための送信部と、遠隔プローブボリュームからリターンされる放射を検出するための受信部と、検出されたリターン放射を分析するためのプロセッサとを含むことが説明されている。デバイスは、洗浄活動化信号に応答して、窓部54を洗浄するための関連の窓洗浄装置(例えば、ワイパ62)を有する窓部を通る放射を送受信するために適している。プロセッサは、検出されたリターン放射の特性が、前記窓部の少なくとも一部分を通る送信の低下を示したときに、窓洗浄装置を活動状態にするための洗浄活動化信号を生成するように構成されている。一実施形態では、円錐形に走査されたライダ66は、検出されたリターン放射のパワーが、デバイスからの放射の送信角度に応じて変動したときに、洗浄活動化信号を生成することが説明されている。対応する方法および耐候性レーザデバイス50もまた、説明されている。 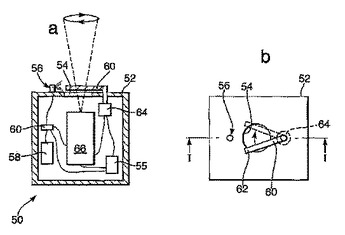 (もっと読む)
(もっと読む)
ビーム照射装置
【課題】簡素な構成にて、目標領域上におけるレーザ光の照射強度の不均一性を検出できるビーム照射装置を提供する。
【解決手段】DSP制御回路10は、PSD600からの信号をもとに、目標領域上におけるレーザ光のスキャン位置をモニタする。また、受光部90からの信号をもとに、各スキャン位置における目標領域からの反射光量を測定する。DSP制御回路10は、目標領域上におけるスキャン位置(参照位置)の反射光量P0と、当該スキャン位置に隣接する各スキャン位置の反射光量Pkとを比較する。そして、Pk/P0が閾値Rs以下のとき、この反射光量Pkに対応するスキャン位置を、レーザ光の照射強度が不均一である位置と判定する。DSP制御回路10は、レーザ光の照射強度が不均一であるとされた位置のレーザ出射強度を上昇させる。これにより、レーザ光の照射強度が目標領域内において均一化される。
(もっと読む)
レーダ装置
【課題】 透過窓部への異物の付着を低減もしくは防止することのできるレーダ装置を提供すること。
【解決手段】 レーダ装置100において、透過窓部41の外部表面への異物の付着を低減若しくは防止する付着防止手段として、車両前方に開口する導入口50aと透過窓部41の外部表面の周縁領域に開口する排出口50bとを有し、排出口50bの断面積が導入口50aの断面積よりも小さいエアダクト50を、レーザ光及びその反射光を妨げず、且つ、排出口50bから排出された空気が透過窓部41の外部表面に供給されるように設けた。従って、車両が走行すると、導入口50aを介してエアダクト50内に空気が流入し、流入した空気は圧力が高められて(流速を増して)排出口50bから排出され、透過窓部41の外部表面全面に沿って勢い良く流れるので、透過窓部41に付着している異物及び/又は付着しようとする異物を効率良く吹き飛ばすことができる。
(もっと読む)
1 - 17 / 17
[ Back to top ]