
Fターム[5L096AA02]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 色 (1,938) | カラー (1,775)
Fターム[5L096AA02]に分類される特許
21 - 40 / 1,775
肌画像分析装置及び肌画像分析方法
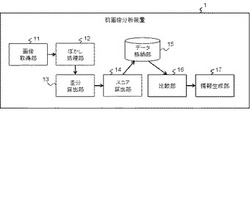
【課題】肌画像に基づいて肌の美しさを客観的に定量化すると共に、その要因分析を可能とする技術を提供する。
【解決手段】肌画像分析装置は、分析対象の肌画像に対して所定ぼかし強度でぼかし処理を施すことによりぼかし画像を取得するぼかし処理部と、上記分析対象肌画像と当該ぼかし画像との間の明暗情報の差分を算出することにより、当該ぼかし画像よりも暗い成分が除去された明差分画像、及び、当該ぼかし画像よりも明るい成分が除去された暗差分画像を生成する差分算出部と、明差分画像及び暗差分画像における各色情報から明成分の大きさを示す明成分代表値及び暗成分の大きさを示す暗成分代表値のペアを算出する代表値算出部と、を備える。
(もっと読む)
画像処理装置及び画像処理方法

【課題】画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置は、三値画像に基づいて、該三値画像の各層に対応する二値画像を生成する二値画像生成部であって、各二値画像において、二値画像が対応する層に属する画素は第1の階調を有し、他の画素は第2の階調を有する、二値画像生成部と、各二値画像において、境界に連結していない第2の階調連結領域を認識する連結領域認識部と、2つの二値画像における第2の階調連結領域の総面積の比率が第1の閾値よりも大きい、且つ2つの二値画像において第2の階調連結領域の総面積が小さい二値画像における第1の階調の領域と第2の階調連結領域の総面積が大きい二値画像における第2の階調連結領域との重なりかみ合い率が第2の閾値よりも大きい場合は、二つの二値画像における第2の階調連結領域の総面積が小さい二値画像が対応する層を文字層と決定し、もう一つの二値画像が対応する層を文字境界領域層と決定する文字層決定部と、を含む。
(もっと読む)
画像処理装置、撮像装置、及びプログラム
【課題】画像をラベリングするための演算処理の負荷を軽減できる画像処理装置、撮像装置、及びプログラムを提供することを目的としている。
【解決手段】撮像された画像データを取得する画像取得部と、取得された画像データからシーンを判別するシーン判別部と、取得された画像データから色情報の頻度分布に基づき主要色を抽出する主要色抽出部と、シーン毎に色情報と第1ラベルとが関連付けられて予め記憶されている記憶部と、記憶部から抽出された主要色と判別されたシーンとに関連付けて予め記憶されている第1ラベルを読み出し、読み出した第1ラベルを取得された画像データのラベルとして生成する第1ラベル生成部と、を備える。
(もっと読む)
画像比較装置および画像比較プログラム
【課題】画像比較検査を容易且つ正確に実施することのできる画像比較装置および画像比較プログラムを提供する。
【解決手段】画像比較装置10は、基準となる画像と検査対象となる画像とを略同一の解像度で読み取ることにより、第1の画像データと第2の画像データとを生成する画像読取手段11,16と、第1の画像データおよび第2の画像データを画面上であおり表示する画像表示手段11,12と、第1の画像データと第2の画像データとを比較することで両画像データ間での差異を検出し、差異が所定の閾値を超えた場合に当該差異の存在する領域に相違点があると判断してあおり表示されている画像データ上にマーキング表示を行う相違点抽出手段11と、を備えており、画像データ上に表示されるマーキングが、ポインティングデバイス15の操作によって追加・削除自在に構成されている。
(もっと読む)
ビジュアル比較方法
【課題】クロスブラウザテストを実行するときに、ビジュアル比較及びエラー予測を改善する方法を提供する。
【解決手段】第1の複数の画像対が評価され、エラーと見なすのに適格な視覚的な対的相違が検出される。視覚的な対的相違は、位置、大きさ、色又はスタイルのうちの少なくとも1つに関する違いとし得る。評価された視覚的な対的相違に基づいて予測エンジンが訓練される。第2の複数の画像対に関する情報が受信される。これらの画像対の各々は、クライアントティア環境において実行されたイベント・ドリブン・アプリケーションの視覚的なエンドユーザ体験画面の少なくとも一部を有する。予測エンジンを用いて、これらの画像対の各々が評価され、エラーと見なすのに適格な視覚的な対的相違が検出される。少なくとも1つの評価された対的相違がエラーと見なされるべきでなかったことを指し示すユーザフィードバックに基づいて予測エンジンが再訓練される。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
情報処理装置、情報処理方法、情報処理装置用プログラム、および、記録媒体
【課題】対象物の追跡が正確にできる情報処理装置等を提供する。
【解決手段】動画の予め選択された1のフレームの画像における対象物2上に少なくとも1つのパーティクルpを設定し(S3)、予め選択された1のフレーム20以降、動画における時間的に前のフレームと時間的に後のフレームとを順次取得し(S4)、取得される前のフレームの画像と後のフレームの画像との背景差分画像30を算出し(S5)、算出された背景差分画像に応じて、パーティクルの追跡範囲の外縁3aを決定し、前のフレームの画像におけるパーティクルの位置を基準とする所定範囲内かつ追跡範囲の外縁内であって、基準としたパーティクルの位置の画素の色情報と類似の色情報を有する画素の位置に、後のフレームの画像におけるパーティクルを設定し(S6)、設定されたパーティクルの位置から、後のフレームの画像における対象物の位置を特定する(S9)。
(もっと読む)
画像処理装置、画像処理方法
【課題】 現実空間画像において、仮想空間画像を重畳させない領域を適切に設定するための技術を提供すること。
【解決手段】 キー領域抽出部303は、現実空間画像において予め定められた画素値を有する画素で構成される第1の領域を抽出する。動きベクトル検出部304は、現実空間画像上の複数箇所における動きベクトルを求める。被写体領域抽出部305は、動きベクトルを用いて、第1の領域にマージする第2の領域を特定する。画像合成部308は、仮想空間画像を現実空間画像上に重畳させる際に、第1の領域と第2の領域とをマージした合成領域は、仮想空間画像の重畳対象外とすることを特徴とする。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】簡単な操作でユーザが特殊効果を与えることを希望する領域を抽出することのできる画像処理装置を提供する。
【解決手段】表示部に表示された画像データにおいて、ユーザから特殊効果を与える対象領域の指定を受け付ける受付部104と、対象領域の画像の特徴を示す特徴量に基づいて、画像データから類似領域を検索する類似領域検索部105と、類似領域のうち、所定の数の類似領域を表示部に表示する表示処理部103と、類似領域の選択を受け付ける受付部104と、選択を受け付けた類似領域と対象領域とに対し、特殊効果を与えるための特殊効果処理を行う特殊効果処理部111とを備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より確実に物体を識別できるようにする。
【解決手段】処理対象画像の注目画素の画素値Xは、画素値を構成する各色成分を軸とする特徴空間の観測点に写像される。識別装置では特徴空間の任意の観測点に対して、その観測点に写像される画素値Xの真値がYである尤度と、ノイズのない肌領域の画素の画素値の肌確率分布とが予め用意されており、これらに基づいて注目画素が肌領域の画素であるかが識別される。すなわち、注目画素の画素値Xに対して用意された尤度から画素値Xの真値がYである真値確率分布が求められ、真値確率分布と肌確率分布との畳み込みにより求められた、注目画素が肌領域の画素である確率に基づいて、注目画素が肌領域の画素であるかの識別が行なわれる。本技術は、識別装置に適用することができる。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
線分および円弧検出装置
【課題】ハフ変換を利用して精度よく線分あるいは円弧を検出することを課題とする。
【解決手段】ハフ変換部14は、第1〜第3成分データ102A〜102Cに対して輪郭抽出処理を実行し、第1〜第3輪郭データ103A〜103Cを生成する。第1〜第3輪郭データ103A〜103Cの各画素は0〜255の画素値を有する。ハフ変換部14は、第1〜第3輪郭データ103A〜103Cの各点に対してハフ変換を実行する。ハフテーブル15には、第1〜第3輪郭データ103A〜103Cの各点の画素値、すなわち輪郭強度の値が加算値として集計される。検出部16は、各成分の集計値を総合評価し、線分あるいは円弧を検出する。
(もっと読む)
画像類似度判定装置、画像類似度判定方法及び画像類似度判定プログラム
【課題】局所的な特徴量を算出した複数の特徴点群の系列を用いて一括して画像間の幾何的な対応を求めて、より計算効率が良く、また、より精度良く画像同士を対応づけして類似度の判定を行う。
【解決手段】複数の画像の類似度を判定する画像類似度判定装置であって、複数の画像それぞれから特徴点群を検出する特徴点検出手段と、複数の画像のそれぞれから検出した特徴点群から、所定のサンプリングを行って、順序関係を持たせた特徴点の系列情報を複数の画像それぞれについて作成して出力する特徴点サンプリング手段と、複数の画像それぞれについて、順序関係を持たせた特徴点の系列情報を特徴ベクトル化して出力する特徴ベクトル生成手段と、複数の画像の特徴ベクトルそれぞれについて線形変換を施して出力する線形変換手段と、線形変換の結果を用いて複数の画像の類似度を判定する類似度判定手段とを備える。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、遮蔽時間長特徴検出部15が、連続的に取得された複数の画像を基にカメラ12の前の空間が塞がれている時間の長さの特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部が、命令を示す命令信号をコンピュータに送信する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】 処理対象の画像データに光沢部分が有るか否かの判定を、従来の判定手段が有する精度よりも高精度に行う。
【解決手段】 識別部13は、処理対象画像から光沢部分の特徴量として、“輝度と色”又は“輝度変化方向”を抽出し、抽出した当該特徴量を基に各々異なる識別手段を有する複数の弱識別器によって光沢部分を識別し、得られる各識別結果にパラメータを掛けて評価値を得、得られる評価値を総合して、所定の光沢部分であるか否かを判定する。検出処理部15は、判定結果により例えば白黒で光沢画像を検出する。学習処理部14は、正解が分かっている所定の光沢部分の訓練用画像を識別部13に用いることにより、学習処理を行い、学習結果として、光沢部分であるか否かの判定を適正化する上記パラメータの値を求める。また、処理対象の印刷用画像データに対しては、学習処理を経て適正化されたパラメータを設定して光沢部分の判定を行う。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、画像特徴検出部15が、カメラ12の前の空間の少なくとも一部が塞がれることにより画像に生じる特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部17が、命令を示す命令信号をコンピュータ(112)に送信する。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】色の劣化が生じた画像からでも、もともとの色領域を正確に抽出することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】前景特徴量算出部11は、それぞれの画素を対象画素として、その対象画素を含む予め決められた範囲の画素の色に対する対象画素の色の違いを示す特徴ベクトルを、予め決められた範囲の画素の色の平均色から対象画素の色への色空間におけるベクトルとして算出する。統合判定部12は、統合対象の二つの画素または領域についての前景特徴ベクトルの類似度に従って、統合の可否を判定する。領域統合部13は、統合判定部12で統合すると判定された二つの画素または領域を1つの領域に統合する。統合する際には、統合後の領域の前景特徴ベクトルを算出しておく。終了判断部14で終了条件を判定し、終了でない場合には統合判定部12に戻って、終了条件が満たされるまで処理を繰り返す。
(もっと読む)
21 - 40 / 1,775
[ Back to top ]