
Fターム[5L096HA08]の内容
イメージ分析 (61,341) | 認識 (5,606) | 辞書パターンと対比するもの (1,918) | 所定のパターンを見付けるもの (655)
Fターム[5L096HA08]に分類される特許
41 - 60 / 655
芝刈り状況監視機能を有する自動芝刈り機
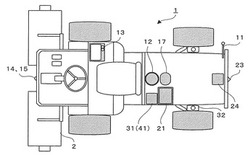
【課題】走行中の芝刈り状況を監視することが可能な芝刈り状況監視機能を有する自動芝刈り機を提供する。
【解決手段】少なくとも位置検出手段を含む各種センサを有する自律走行型の自動芝刈り機であって、走行車両の駆動系(アクセル)、制動系(ブレーキ)、及び操舵系(ステアリング)のうちの少なくとも一つを自動操作するためのアクチュエータと、アクチュエータにより走行車両を目標地点に移動させるための走行制御ユニットと、走行路面に沿って芝刈りを行うカッティング部と、芝刈り状況を判断するための画像処理ユニットと、センサの情報を基に各ユニットを制御するための各種演算及び演算に対応する処理を行う演算ユニットと、無線通信により演算ユニット及び走行制御ユニットを介して走行車両を遠隔操作するための無線通信手段と、を備える。
(もっと読む)
照合装置

【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
人物管理装置および人物管理方法
【課題】人の手を介することなく、人物の身なりが適切であるか否かを判定する。
【解決手段】人物管理装置1は、撮影画像を取得する画像取得手段11と、検出対象物の情報を記憶する記憶手段12と、画像取得手段により取得された撮影画像から人物の顔を検出する顔検出手段13と、顔検出手段により検出された顔の座標に基づいて、検出対象物が存在すべき領域を設定する領域設定手段14と、領域設定手段で設定された領域に検出対象物が存在し、検出対象物が適切に装備されているか否かを判定する判定手段15と、判定手段の判定結果に応じた処理を行う制御手段16と、を備える。
(もっと読む)
パターン識別装置、パターン識別方法およびプログラム
【課題】全体的な照明変動および部分的な陰影の変動に対して精度の高いパターン識別ができるようにすることを目的とする。
【解決手段】所定の変動を加えた変動入力画像および変動登録画像を生成する変動画像生成手段と、変動入力画像から入力部分特徴を抽出し、変動登録画像の入力部分特徴に対応する登録部分特徴を抽出する部分特徴抽出手段と、入力部分特徴と登録部分特徴の部分特徴の類似度を、変動画像の所定の組み合わせ毎に算出する部分特徴類似度算出手段と、部分特徴類似度算出手段で計算された、少なくとも1つ以上の部分特徴類似度を所定の基準で統合した統合部分特徴類似度を算出する部分特徴類似度統合手段と、統合部分特徴類似度を部分領域毎に所定の基準で統合し、入力画像および登録画像間の識別類似度を算出する識別類似度算出手段と、を有することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】より適切に被写体を検出することを目的とする。
【解決手段】入力映像の画素または部分領域ごとに特徴量を抽出し、特徴量と時間情報とを組みとした複数の状態を背景モデルとして記憶し、入力映像の特徴量と背景モデルとを比較して入力映像に類似する背景モデル中の状態を判定し、類似すると判定した状態の時間情報を更新し、類似すると判定した状態の時間情報に基づいて前景領域を判定し、前景領域に対して所定の被写体の検出を行い、検出の結果に基づいて背景モデル中の状態の時間情報を補正することによって課題を解決する。
(もっと読む)
オブジェクト識別装置、オブジェクト識別方法、及びプログラム
【課題】画像に含まれるオブジェクトの識別の精度をより高めることを目的とする。
【解決手段】入力画像に含まれる入力オブジェクトおよび登録画像に含まれる登録オブジェクトのオブジェクト間の変動量を検出するオブジェクト間変動量検出手段と、入力オブジェクトと登録オブジェクトとで、少なくとも1つ以上の対応する部分特徴量を抽出する部分特徴抽出手段と、オブジェクト間の変動量の大きさに応じて部分特徴抽出手段で抽出された部分特徴量を組み合わせる合成方法を決定し、決定した合成方法で部分特徴量を合成して合成部分特徴量を生成する部分特徴量合成手段と、合成部分特徴量を用いて、入力オブジェクトがどの登録オブジェクトに対応するかを識別する入力オブジェクト識別手段と、を有することによって課題を解決する。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】高精度かつ処理コストの低い被写体検出器を提供する。
【解決手段】入力画像に対して検出ウィンドウを走査する検出ウィンドウ走査手段と、検出ウィンドウ内の画像が、検出対象の被写体全体か否かを判定し、被写体候補を出力する被写体全体判定手段と、被写体候補同士に所定の重なりがある場合に重なりのある前記被写体候補の組みを出力する被写体候補重複判定手段と、予め検出ウィンドウ上に1つまたは複数の部分領域を設定し、各々の領域が被写体の一部であるか否かを判定する被写体部分判定手段と、被写体候補重複判定手段が出力する被写体候補の組みについて、被写体部分判定手段の結果に基づき被写体か否かを総合的に判定する被写体判定手段を有し、検出ウィンドウ走査手段は、入力画像に対する検出ウィンドウを相対的に複数のサイズで走査し、被写体候補の組みはそれぞれの組みにおいてサイズの異なる被写体候補を少なくとも1つ有する。
(もっと読む)
歩行者検出装置
【課題】監視エリアを所定時間毎に撮影して取得した画像を処理して、監視エリア内の歩行者を検出するときの検出精度を高める。
【解決手段】監視エリア100内を歩行者101が矢印102の方向に移動する。歩行者101の足は片方ずつ交互に動き、交互に静止する。領域103、104、105内の静止部分の下端の中心間距離は歩幅に対応し、領域103、104、105内の静止部分の発生周期は歩行周期に対応する。背景差分により異物画像201を検出し、フレーム間差分により移動物体画像202を検出する。背景差分とフレーム間差分との差分により、異物画像中の静止領域画像204を抽出する。隣り合う静止領域画像204の下端の中心間距離、発生周期が、歩幅、歩行周期に対応すれば、歩行者であると判定する。
(もっと読む)
認識装置、認識方法及びプログラム
【課題】学習画像にあまり含まれない特徴パターンを含む画像が入力された場合においても、被写体を安定して検出することができるようにする。
【解決手段】入力画像から複数の特徴量を算出する特徴算出手段と、前記特徴量の夫々について事前に収集した画像及びその重みから認識対象に対する尤度を出力するように生成した認識モデルを用いて前記特徴量の尤度を求め、前記入力画像が前記認識対象かどうかを判定する判定手段とを備え、前記判定手段は、前記特徴量の値に該当する学習画像数が所定の値よりも少なく、かつ前記尤度の確信度が所定の値よりも高い場合に前記尤度の確信度が低くなるように補正する。
(もっと読む)
画像処理装置、画像処理システム及び画像処理方法
【課題】認識処理を軽減することを目的とする。
【解決手段】第一の撮像手段で撮像された画像を取得する取得手段と、取得手段で取得された画像から物体領域を検知する検知手段と、画像中の第一の撮像手段と第二の撮像手段との共有領域に、検知手段で検知された物体領域がある場合、共有領域の物体認識処理を画像処理装置で行うか、第二の画像処理装置で行うか否かを判断する判断手段と、判断手段において画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲に設定し、判断手段で第二の画像処理装置で行うと判断された場合、物体認識範囲を画像の全範囲から共有領域を除いた領域に設定する設定手段と、設定手段で設定された物体認識範囲に物体が写っているか否か物体認識を行う認識手段と、を有する。
(もっと読む)
画像処理プログラム、画像処理方法、画像処理装置、撮像装置
【課題】動画像コンテンツ同士の類似度を的確に自動判定する。
【解決手段】本発明の画像処理プログラムは、動画像を入力する入力ステップ(S21)と、前記動画像を複数のセグメントに分割する分割ステップ(S22、S22’)と、前記複数のセグメントの間における特徴量の変化パターンを求める算出ステップ(S23、S24、S25)と、前記動画像に関する前記変化パターンと、他の動画像に関する前記変化パターンとに基づき、前記動画像と前記他の動画像との間の類似度を判定する判定ステップ(S26)と、をコンピュータに実行させる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】物体認識において使用されている認識手法をユーザに簡易にフィードバックする。
【解決手段】入力画像を取得する画像取得部と、複数の認識手法から上記入力画像に映る物体の認識手法を選択する選択部と、上記選択部により選択される認識手法を用いて、上記入力画像に映る物体を認識する認識部と、上記認識部により認識される物体と関連付けられる仮想オブジェクトを上記入力画像に重畳して表示する表示制御部と、を備え、上記表示制御部は、上記選択部により選択される認識手法に応じて、上記仮想オブジェクトの表示を変化させる、画像処理装置が提供される。
(もっと読む)
画像検索および認識システム
【課題】利用者が提示した例示画像を基に画像データベースから利用者が望む画像を検索する画像検索システム、および、利用者が提示した例示画像が何を表しているかそのカテゴリを判断する画像認識システムにおいて、処理時間の短縮、精度の向上が課題となている。
【解決手段】例示画像の顕著性が高い部分だけから抽出した顕著特徴と予め抽出された画像データベース内の画像の顕著性が高い部分だけから抽出した顕著特徴を比較することによって、より短い処理時間でより正確に判断する画像認識システムを提供する。
(もっと読む)
類似映像出力方法、類似映像出力装置および類似映像出力プログラム
【課題】印象が類似する映像データを出力する。
【解決手段】類似映像出力装置1は、複数の映像データが記憶された映像データ記憶部12と、複数の映像データのそれぞれについて、当該映像データを分割した区間毎の構造的特徴の出現する時間を構造的特徴量として算出し、構造的特徴量に基づいて、映像データ間の構造的特徴類似度を算出して、構造的特徴類似度データを出力する構造的特徴類似度算出手段22と、構造的特徴類似度データに基づいて、映像データ記憶部12から、基準映像データに類似する映像データを抽出する類似映像決定手段24と、を備える。
(もっと読む)
画像処理装置及びプログラム
【課題】撮像手段により撮像された被写体の画像を含む撮像画像のうちで被写体の画像に対応する領域である被写体領域を検出する場合における、被写体領域の検出精度を向上させる。
【解決手段】撮像画像に基づいて、被写体領域の輪郭を構成する直線の候補を複数特定する直線候補特定部(24)と、特定された候補が被写体領域の輪郭を構成する直線となる確からしさを表す直線確度を、撮像画像に基づいて特定される、当該候補との間の距離が基準距離以内である位置の特徴量に基づいて算出する直線確度算出部(26)と、特定された複数の候補のうちから選出される4つの候補により囲まれる領域である領域候補が被写体領域である確からしさを表す領域確度を、該4つの候補の各々の直線確度に基づいて算出する領域確度算出部(30)と、算出された領域確度に基づいて被写体領域を検出する領域選択部(32)と、を含む画像処理装置である。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
視線計測システム、方法およびプログラム
【構成】 サーバ12は、ステップS105で、顔の特徴点の位置データを取得し、ステップS107で顔の姿勢および位置のデータを取得する。ステップS111において、特徴点の位置データおよび顔の位置および姿勢データに基づいてフレーム画像毎に個人パラメータおよびフレームパラメータを設定し、ステップS115で、個人パラメータおよびフレームパラメータの各フレーム顔画像に対する適合度を示すスコア値を計算し、全フレーム画像についてそのスコア値を積算する。積算スコア値が所定の閾値を下回るまで、ステップS121で各パラメータを修正する。修正された個人パラメータおよびフレームパラメータに基づいて、眼球中心と虹彩中心を結ぶ3次元直線として視線方向を計測する(S123)。
【効果】 全フレームの顔画像と照合して個人的パラメータおよびフレームパラメータを修正するので、視線の推定または計測の精度を向上させることができる。
(もっと読む)
画像処理装置、画像処理プログラムおよび画像処理方法
【課題】位置合わせを正確に行うことができる画像処理装置を提供する。
【解決手段】画像間の位置合わせを行う画像処理装置であって、位置合わせ基準となる基準画像を決定する基準画像選択部2と、基準画像と、基準画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出すると共に、基準画像と位置合わせを行う参照画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出する鏡面ハイライト領域検出部3と、鏡面ハイライト領域の位置情報に基づいて少なくとも鏡面ハイライト領域に重みを設定する重み設定部4と、重みを用いて、基準画像と参照画像とのマッチングを行って位置ずれ量を算出する位置ずれ量算出部5とを備え、重み設定部4は、鏡面ハイライト領域、あるいは鏡面ハイライト領域および鏡面ハイライト領域の周辺領域の重みを、鏡面ハイライト領域、あるいは鏡面ハイライト領域および周辺領域以外の領域の重みよりも小さく設定する。
(もっと読む)
3Dパターンマッチング方法
【課題】 レーザ計測等によって得られた3次元の点群データから対象物を精度よく検出する。
【解決手段】 レーザ計測によって得られた3次元の点群データに対して、ノイズを除去するためのリサンプリング処理を施す。そして、予め用意されたテンプレートとのマッチングを行う。テンプレートマッチングでは、まず、点群データおよびテンプレートを、共に所定サイズの格子に区切り、各格子内に存在するデータ点数をその格子の特徴量とする。こうして定義された特徴量に基づいて、点群データとテンプレートとを照合することによって、両者の位置関係、一致/不一致を比較的容易に判定することができる。テンプレートマッチングによって対象物が検出された後は、ICPマッチングによって、テンプレートと点群データとの位置関係をより精密に合致させ、対象物の検出を行う。
(もっと読む)
41 - 60 / 655
[ Back to top ]