
Fターム[5L096HA08]の内容
イメージ分析 (61,341) | 認識 (5,606) | 辞書パターンと対比するもの (1,918) | 所定のパターンを見付けるもの (655)
Fターム[5L096HA08]に分類される特許
81 - 100 / 655
画像処理装置、画像処理方法及び画像処理プログラムを記録した記録媒体
【課題】撮影された時系列画像から、人物らしい領域に対して個人が特定できないように画像変換を行う。
【解決手段】複数フレームの画像を元に、各画素の平均値を算出するステップと、平均値から大きく外れている画素値を取り除くステップと、該当画素から分散値を算出するステップと、分散値に対して、膨張処理、収縮処理を行い、分散値画像を生成し、多次元の変換式により変換を行うステップと、背景画像を更新するステップと、取得した画像から低周波数成分画像を生成するステップと、取得した画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と取得した画像との差異から人物らしさを算出するステップと、高周波数成分画像の各画素の値を人物らしさの各画素の値を用いて抑制した抑制後の高周波数成分画像を生成するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成して結果画像を生成するステップを有する。
(もっと読む)
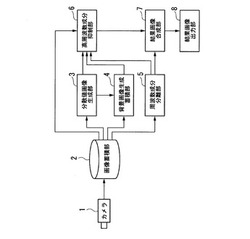
多角度の人間顔検知方法及びシステム

【課題】本発明は、多角度の人間顔検知システム及び方法を提供する。
【解決手段】多角度の人間顔検知システムは、画像データを入力する入力装置と、非人間顔の画像データを1次検知する非人間顔拒絶階級分類器と人間顔を含む画像データに角度タグを付与する複数の角度タグ分類器を有する混合分類器と、各々が各々の人間顔角度に対応し、いずれか一つが対応する角度タグ分類器から出力される角度タグ付きの画像データを受け付け、該受け付けられた角度タグ付きの画像データに人間顔が含まれているか否かをさらに検知する複数の角度多段接続分類器と、を備える。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
探索省略領域設定関数生成方法、探索省略領域設定方法、オブジェクト探索方法、探索省略領域設定関数生成装置、探索省略領域設定装置、及びオブジェクト探索装置
【課題】オブジェクト探索の効率化を図ることが可能な探索省略領域設定関数生成方法を提供すること。
【解決手段】探索省略領域設定関数生成方法は、モデル画像上の指定探索点に対して、前記モデル画像からオブジェクトを探索するためのテンプレートを対応付けて、前記指定探索点と前記テンプレートとの指定探索点類似度を検出し、前記指定探索点類似度がオブジェクト検出判定閾値を超える場合、前記モデル画像上の前記指定探索点の周辺の複数の周辺探索点の夫々と、前記テンプレートとの周辺探索点類似度を検出し、前記周辺探索点類似度の分布に基づき前記オブジェクトと前記テンプレートとの相対位置を推定し、推定相対位置に基づき前記オブジェクトの探索省略領域を設定するための関数を生成する。
(もっと読む)
端末装置、サーバ装置、およびプログラム
【課題】撮影オブジェクトを用いたナビゲーション情報を出力できない。
【解決手段】地図情報とオブジェクト識別子とオブジェクトの領域情報とを有する1以上のオブジェクト情報と、目的地点情報とを格納し、撮影した映像を出力する出力部と、端末装置の位置情報を有する端末情報を取得する端末情報取得部と、位置情報と方向情報と視野角とを、各オブジェクト情報の領域情報に適用し、1以上の撮影オブジェクトを決定する撮影オブジェクト決定部と、位置情報と目的地点情報とを用いて地図情報を経路探索し、経路情報を取得する経路探索部と、1以上の撮影オブジェクトのうちのいずれかのオブジェクトが、経路情報が示す経路に含まれる場合、オブジェクトを用いたナビゲーション情報を取得するナビゲーション情報取得部とを具備し、出力部は経路情報とナビゲーション情報をも出力する端末装置により、撮影オブジェクトを用いたナビゲーション情報を出力できる。
(もっと読む)
物体検出装置、物体検出方法及びプログラム
【課題】検出対象の物体の検出ミスを防止する。
【解決手段】輝度勾配算出部3が、画像データ中の画素における輝度の変化率を示す輝度勾配を算出し、ヒストグラム算出部4が、所定の大きさの画像領域ごとに区切られた画像データの画像領域に対して、輝度勾配の所定の角度範囲ごとをデータ区間とするヒストグラムを算出し、シフト部5が、ヒストグラムのデータ区間をシフトさせてヒストグラムを変更し、類似度算出部6が、シフト部5でデータ区間がシフトされた画像領域のヒストグラムと、ヒストグラム算出部4で算出された他の画像領域のヒストグラムとの間の類似度を算出し、物体検出部8が、類似度を特徴量に用いて、画像データから検出対象の物体を検出する。
(もっと読む)
動作解析装置
【課題】ユーザにとって、簡易に使用可能な動作解析装置を提供することである。
【解決手段】動作解析装置は、動画の入力を受け付けると(S11)、静止画を操作部に表示する(S12)。動作解析装置は、ユーザから静止画像上の任意の箇所を指定される(S13)。そうすると、指定点を中心とした半径rの範囲内において、第一の特徴点の検索を行う(S14)。そして、第一の特徴点を検索した静止画より時間的に後に隣り合う静止画において、第一の特徴点に対応する第二の特徴点の検索を行う(S15)。そして、特徴点の差を算出し(S16)、算出した差の平均値を求める(S17)。そして、連続する複数の静止画の隣り合う静止画像間の全てにおいて、特徴点の差をそれぞれ算出し、算出した差の平均値を求めると(S18において、YES)、求めた平均値を順に接続する。このようにして軌跡を作成する(S19)。
(もっと読む)
分析装置、分析方法およびコンピュータプログラム
【課題】マルチメディア情報を利用して、定量的・客観的なモデリング技術によって現象を分析することが可能な分析装置を提供する。
【解決手段】本発明の分析装置は、分析対象物を生成するプロセスにおいて、当該プロセスにて生成される分析対象物を分析する。かかる分析装置は、分析対象物の分析対象画像から画像に現われる形状的特徴を表す画像特徴量を抽出する第1の特徴量抽出部と、分析対象物を生成する過程におけるプロセスデータから当該プロセスデータに現われるデータ上の特性を表すデータ特徴量を抽出する第2の特徴量抽出部と、第1の特徴量抽出部により抽出された画像特徴量と、第2の特徴量抽出部により抽出されたデータ特徴量との相関関係に基づいて、プロセスにて生成される分析対象物について予測される予測画像特徴量を算出する予測部と、を備えることを特徴とする。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】相互のズレが画像内で不均一な複数の画像について算出される類似度を向上させる。
【解決手段】画像処理装置であって、第1と第2の画像とを取得する取得手段と、複数の部位で前記第2の画像を局所的に変形した派生画像の画像データを生成する生成手段と、前記第1の画像と前記派生画像との画像データに基づいたパターンマッチング演算によって、前記第1と前記第2の画像との類似度を算出する算出手段とを備える。そして、画素座標が互いに対応する画素として、前記第1の画像の注目画素と、前記第2の画像の対応画素と、前記派生画像の派生対応画素とを定義したとき、前記生成手段は、前記注目画素に対して、前記対応画素を空間的に内包する内包領域を前記第2の画像において設定する手段と、前記注目画素の画素値と、前記内包領域内の複数の画素の画素値との一致度に基づいて、前記派生対応画素の画素値の取得処理を行う画素値取得手段とを備える。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
ホワイトリスト内外判定装置及び方法
【課題】ホワイトリスト内外判定装置の設置された場所により変低結果が不安定になる。
【解決手段】複数の事前学習画像を元に生成した1次変換式を用いて、画像から1次特徴データを抽出する1次特徴データ抽出手段と、前記事前学習画像および複数の応用学習画像から生成した2次変換式を用いて、画像から2次特徴データを抽出する2次特徴データ抽出手段と、前記1次変換式を用いて登録画像と照合画像とのマッチングを行う1次マッチング手段と、前記2次変換式を用いて登録画像と照合画像とのマッチングを行う2次マッチング手段とを有し、前記1次マッチング手段のマッチング結果と前記2次マッチング手段のマッチング結果の重みとを前記事前学習画像の枚数と前記応用学習画像の枚数に応じて変える。
(もっと読む)
視覚センシング方法および視覚センシング装置
【課題】汎用性に優れた視覚センシング方法を提供する。
【解決手段】撮影画像とマッチングモデルとを比較してパターンマッチングを行うパターンマッチング行程と、パターンマッチング行程で用いた撮影画像のうちマッチングモデルとマッチングした部位に基づいて更新マッチングモデルを生成し、更新マッチングモデルに基づいてマッチングモデルを更新するマッチングモデル更新行程とを含む。さらに、撮影画像から探索対象領域を絞り込んで探索対象画像を生成する探索対象画像生成行程を含み、パターンマッチング行程では、撮影画像の代わりに探索対象画像を用いてパターンマッチングを行い、探索対象画像生成行程では、以前に行った複数回のパターンマッチング行程で求めたマッチング位置に基づいて探索対象領域を決定する。
(もっと読む)
形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置
【課題】形状ベースマッチング処理における精度や処理時間、ロバスト性等の特性に関して最適化されたテンプレートデータを作成するための形状ベースマッチングパラメータの調整装置、形状ベースマッチングパラメータの調整方法および部品実装装置を提供する。
【解決手段】形状ベースマッチング処理を用いて電子部品2の搭載位置決めをする部品実装装置において、サーチ評価画像を取得し、このサーチ評価画像をもとに上記パラメータを調整する。このとき、先ず、位置決め処理の精度が、ユーザが指定した要求精度を満たすようにパラメータを設定する。次に、位置決め処理のタクトタイムが短縮する方向に上記パラメータを徐変しながら精度を評価し、当該精度が要求精度を保てる限界値を最適なパラメータとして取得する。この最適パラメータ取得処理を、部品ロットの切り替わりに際し必要に応じて行う。
(もっと読む)
ヒューマンコンピュータインタラクションシステム、手と手指示点位置決め方法、及び手指のジェスチャ決定方法
【課題】HCIシステムにおける手と手指示点の位置決め方法及び手指のジェスチャ決定方法を提供する。
【解決手段】手位置決め方法は、被制御領域の画像を連続取得して、前景物が含まれる画像列を取得する段階と、撮像した前記画像から前景画像を抽出し、抽出した前記前景画像の2値化処理を行って、2値化前景画像を生成する段階と、前記2値化前景画像の最小凸包の画素頂点集合を取得し、該最小凸包の各画素頂点を中心点に、手が含まれる候補領域として関心領域を構築する段階と、構築した前記各関心領域から手画像特徴を抽出し、パターン認識方法により、前記候補領域における前記手が含まれる関心領域を決定する段階とを含む。
(もっと読む)
対話シナリオ処理装置及びプログラム
【課題】 第1の話者と対話する第2の話者に提示する対話シナリオの生成において、第1の話者の満足度を向上させる対話シナリオを生成する。
【解決手段】 本発明は、第1の話者と対話する第2の話者に提示するための対話シナリオの処理を行う対話シナリオ処理装置に関する。そして、シナリオ処理装置は、第1の話者の顔を撮像した画像データを保持する手段と、保持した画像データから、第1の話者の表情の特徴に係る表情情報を抽出する手段と、抽出した表情情報を利用して、第1の話者の表情を分析する手段と、分析結果に応じた内容の対話シナリオを生成する手段とを有することを特徴とする。
(もっと読む)
距離画像カメラを用いた人体識別方法および人体識別装置
【課題】共連れを極力的確に検知できる距離画像カメラを用いた人体識別方法および人体識別装置を提供する。
【解決手段】
距離画像カメラで監視対象領域の距離画像を取得する撮像工程と、取得された距離画像から算出した各部の法線ベクトルの角度を画素値とする法線ベクトル画像を算出する法線ベクトル画像算出工程と、人体の少なくとも頭部が含まれるように撮像した距離画像から法線ベクトル画像をテンプレートとして準備するテンプレート準備工程と、画素値である距離情報に基づいて、各テンプレートのサイズを変倍するテンプレート変倍工程と、その各テンプレートと前記監視対象領域法線ベクトル画像との適合度が所定閾値以下であるか否かに基づいて、人体に対応する1つ以上の領域を推定する人体対応領域推定工程と、この人体対応領域推定工程で人体に対応すると推定された各領域の論理和に基づいて人体の数を判定する人数判定工程とを含む。
(もっと読む)
画像処理装置及び画像処理方法
【課題】静止した検出対象の検出精度が低下する問題を避けながら、動き情報を対象物の検出に汎用的に活用できる技術を提供することを目的とする。
【解決手段】時系列に連続する複数の静止画像を入力する入力手段と、入力手段で入力された複数の静止画像のうち、一の静止画像から検出対象物の存在確率を表わす検出対象尤度を求める識別手段と、一の静止画像と時系列に連続する他の静止画像とから検出対象物の動き情報が得られる場合には、動き情報が示す動きの検出対象物の動きとしての妥当性を表す重み係数を算出する算出手段と、算出手段で算出された重み係数に基づき、識別手段で求められた検出対象尤度を評価する評価手段と、を有することによって課題を解決する。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】駐車検出装置1は、表示パターンが描かれた複数の駐車マスを含む検出対象エリアを撮影する撮影手段(カメラ10)と、空車状態の検出対象エリアの画像に対してPrewittエッジ処理を施して基準画像データ23dを生成するとともに画素毎の積和値が最大となったマスクパターンをエッジオペレータとして記憶する基準データ生成手段(エッジ抽出処理部24)と、判定対象の画像に対してエッジオペレータによるエッジ抽出処理を施した被検査画像データ(エッジ抽出処理画像データ23c)を生成する検査データ生成手段(エッジ抽出処理部24)と、被検査画像データと基準画像データとの相関から駐車の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】通信時間及び電力を削減するとともに記憶領域を削減できるようにする。
【解決手段】複数のマッチング処理パターンを保持する外部記憶装置を有する画像処理装置であって、複数のマッチング処理パターンを保持する手段と、任意の入力に対し前記マッチング処理パターンの一部を適用する手段と、前記外部記憶装置から前記マッチング処理パターンの一部もしくは全部を取得する手段とを備える。
(もっと読む)
画像処理装置
【課題】高速且つ精度良く対象物を探索する。
【解決手段】テンプレートを記憶し、テンプレートを用いて対象物を探索する画像処理装置において、対象物のテンプレート画像の濃淡画像データ及びサーチ画像の濃淡画像データの少なくとも一方からエッジ画像を生成するエッジ画像生成手段と、エッジ画像から画像エネルギーを生成する画像エネルギー生成手段と、画像エネルギーからサーチ画像内の点及びテンプレートの特徴点の少なくとも一方が受ける移動ベクトルを算出する移動ベクトル算出手段と、移動ベクトルを移動量に変換する移動量変換手段と、移動ベクトルの総和が収束条件を満たすか否かによりテンプレートがサーチ画像上の対象物の位置に合致したことを判定する判定手段と、判定手段が収束条件を満たすと判定した時の移動量から探索情報を求める探索情報取得手段とを備えている。
(もっと読む)
81 - 100 / 655
[ Back to top ]