
Fターム[5L096JA09]の内容
Fターム[5L096JA09]に分類される特許
41 - 60 / 808
画像処理装置、画像処理方法、及びプログラム
【課題】より適切に被写体を検出することを目的とする。
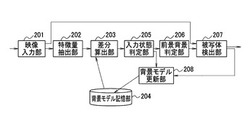
【解決手段】入力映像の画素または部分領域ごとに特徴量を抽出し、特徴量と時間情報とを組みとした複数の状態を背景モデルとして記憶し、入力映像の特徴量と背景モデルとを比較して入力映像に類似する背景モデル中の状態を判定し、類似すると判定した状態の時間情報を更新し、類似すると判定した状態の時間情報に基づいて前景領域を判定し、前景領域に対して所定の被写体の検出を行い、検出の結果に基づいて背景モデル中の状態の時間情報を補正することによって課題を解決する。
(もっと読む)
オブジェクト識別装置、オブジェクト識別方法、及びプログラム

【課題】画像に含まれるオブジェクトの識別の精度をより高めることを目的とする。
【解決手段】入力画像に含まれる入力オブジェクトおよび登録画像に含まれる登録オブジェクトのオブジェクト間の変動量を検出するオブジェクト間変動量検出手段と、入力オブジェクトと登録オブジェクトとで、少なくとも1つ以上の対応する部分特徴量を抽出する部分特徴抽出手段と、オブジェクト間の変動量の大きさに応じて部分特徴抽出手段で抽出された部分特徴量を組み合わせる合成方法を決定し、決定した合成方法で部分特徴量を合成して合成部分特徴量を生成する部分特徴量合成手段と、合成部分特徴量を用いて、入力オブジェクトがどの登録オブジェクトに対応するかを識別する入力オブジェクト識別手段と、を有することによって課題を解決する。
(もっと読む)
電子装置、データ生成方法およびデータ生成プログラム
【課題】異なる種類のセンサで検出された信号を比較する。
【解決手段】入力された情報を抽象化する抽象化部24と、抽象化された情報を正規化する正規化部25と、正規化された情報を2つ以上比較し、該比較結果に基づいて該2つ以上の正規化された情報が同種の情報であるか否か判定する比較判定部27と、を備える。
(もっと読む)
画像処理装置及びその制御方法、プログラム
【課題】 撮像画像中の被写体の身長を好適かつ精度良く測定する。
【解決手段】 撮像画像に含まれる等高線指標に基づいて作成された等高線データを記憶する。記憶された等高線データを、撮像画像中に表示させる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】処理負荷を抑えつつ、より高性能なパターン認識を実現することを目的とする。
【解決手段】特徴抽出手段で抽出された画像の特徴に対して複数の部分領域を設定する領域設定手段と、部分領域毎の部分空間を保持する部分空間保持手段と、領域設定手段で設定された複数の部分領域から複数の特徴ベクトルを生成し、部分空間保持手段に保持される部分空間に射影し、複数の射影ベクトルを生成する部分空間射影手段と、部分空間射影手段で生成された複数の射影ベクトルから部分領域の夫々に対応する射影ベクトルを選択する選択手段と、選択手段で選択された射影ベクトルを連結し、識別特徴を生成する特徴生成手段と、特徴生成手段で生成された識別特徴を使用して識別処理を行う識別処理手段と、を有する。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法及び動きベクトル検出プログラム
【課題】移動物体上の動きベクトルを正確に検出することができる動きベクトル検出装置を提供する。
【解決手段】少なくとも2枚のフレーム画像を入力し、入力した2枚のフレーム画像から特徴点の動きベクトルを算出し、算出した動きベクトルと、最新時刻のフレーム画像とを出力する手段と、最新時刻フレーム画像と、動きベクトルから誤検出ベクトルと推測される動きベクトルをテンプレートマッチングを用いて検出し、入力された動きベクトルから、検出した誤検出ベクトルを除いた動きベクトルを出力する手段と、誤検出ベクトルを除いた動きベクトルについて、画像上での角度パラメータを算出し、算出した角度パラメータを各動きベクトルに唯一付与された動きベクトルIDを関連付けた特徴量リストを作成し、作成した特徴量リストを出力する手段と、特徴量リスト中の動きベクトルをクラスタリングすることにより、動きベクトルを決定して出力する手段とを備えた。
(もっと読む)
画像認識装置、画像認識方法、及びプログラム
【課題】局所領域ごとの属性に基づいた画像の認識の利点を生かしつつ、より容易に画像を認識することを目的とする。
【解決手段】入力画像から複数の局所領域を切り出して特徴量を抽出する抽出手段と、抽出手段で抽出された特徴量を、局所領域ごとの属性に対する度合いを表す特徴量に射影行列を用いて変換する射影手段と、射影手段で変換された特徴量を登録画像の特徴量と照合する照合手段と、照合手段での結果を統合して入力画像と登録画像とが同じものであるかを識別する識別手段とを有することによって課題を解決する。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】サブ領域毎に特徴値のヒストグラムを高速に算出すると共に、サブ領域における特徴値のヒストグラムの算術演算値を複数のサブ領域に渡って総和した値を高速に算出する。
【解決手段】処理対象画像の各画素の特徴値を算出し、各ビン別に、特徴値の積分値を付与した積分画像を作成する(S3−2)。各ビン別に、各位置にサブ領域を設定した場合について、サブ領域内の特徴値のヒストグラムの値を、サブ領域内の座標(x、y)に付与したサブ領域積算値画像を生成する。各ビン別に、各位置にサブ領域を設定した場合について、サブ領域内の座標(x、y)において計算されたサブ領域積算値画像の各画素値(ヒストグラムの値)と座標(x、y)に対してサブ領域の大きさのn倍離れた座標において計算されたサブ領域積算値画像の各画素値(ヒストグラムの値)の2乗和を、座標(x、y)に付与したサブ領域積算値積分画像を生成する(S3−3)。
(もっと読む)
画像処理方法および監視装置
【課題】監視環境が時々刻々と変化するような場面でも、検出すべき物体の位置や速度と言った属性を正しく計測する。
【解決手段】撮像装置において撮像した入力画像を処理して、入力画像のエッジ情報を抽出し、エッジ情報に基づいてテンプレート画像を作成して記憶し、記憶されたテンプレート画像とその位置情報に基づいてテンプレートマッチング処理を実行し、マッチングに成功したテンプレートはその位置座標を更新し、マッチングに失敗したテンプレートは削除し、テンプレートマッチング処理の結果に基づいて検出すべき物体の位置や速度の少なくとも一つの属性を計測し、検出された物体の危険度を判定するようにする。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 印刷に現れる特徴に基づいて個々の物品を識別することが可能な個体識別装置、個体識別方法、及びプログラムを提供する。
【解決手段】 印刷は、印刷の条件(個々の印刷装置、インク、気温、湿度、その他の要因)によって異なる特徴が現れる。この特徴を画像処理によって顕現させ、個々の物品を識別する。即ち、基準とする物品に付与された印刷部を光学的に読み取った基準画像データに二値化処理等の画像処理を施して特徴点を抽出し、基準特徴点データとして記憶する。また、識別対象とする物品に付与された印刷部についても同様の手法で画像を読み取り、同様の画像処理を施して特徴点を抽出する。そして、抽出された対象物特徴点データと記憶されている基準特徴点データとを比較することにより、識別対象とする物品と基準物品とが同一個体であるか否かを判別する。
(もっと読む)
視線計測システム、方法およびプログラム
【構成】 サーバ12は、ステップS105で、顔の特徴点の位置データを取得し、ステップS107で顔の姿勢および位置のデータを取得する。ステップS111において、特徴点の位置データおよび顔の位置および姿勢データに基づいてフレーム画像毎に個人パラメータおよびフレームパラメータを設定し、ステップS115で、個人パラメータおよびフレームパラメータの各フレーム顔画像に対する適合度を示すスコア値を計算し、全フレーム画像についてそのスコア値を積算する。積算スコア値が所定の閾値を下回るまで、ステップS121で各パラメータを修正する。修正された個人パラメータおよびフレームパラメータに基づいて、眼球中心と虹彩中心を結ぶ3次元直線として視線方向を計測する(S123)。
【効果】 全フレームの顔画像と照合して個人的パラメータおよびフレームパラメータを修正するので、視線の推定または計測の精度を向上させることができる。
(もっと読む)
画像監視装置
【課題】監視空間を撮像して顔を隠した不審者の存在を検出する画像監視装置に関し、フルフェイスヘルメットと人物の後頭部とを区別して判定できる画像監視装置を提供する。
【解決手段】監視空間においてヘルメットなどにより顔を隠蔽した不審者を検出する画像監視装置3であって、周期的に前記監視空間を撮像して監視画像を取得する撮像部31と、予め顔特徴情報を記憶する記憶部33と、前記監視画像から人物の頭部に相当する入力頭部領域を抽出する頭部抽出部342と、前記入力頭部領域が顔の特徴情報を有しているか前記顔特徴情報を用いて判定する顔特徴判定部343と、前記入力頭部領域に所定面積以上の高輝度領域が存在するか判定する高輝度領域抽出部344と、前記顔特徴判定部にて顔の特徴情報無しと判定され、且つ前記高輝度領域抽出部にて高輝度領域の存在が判定されると、顔を隠蔽した不審者と判定する不審者検出部345とを備える。
(もっと読む)
対象物追跡装置および対象物追跡システム
【課題】撮像画像中の対象物の追跡をより確実に行うことを可能にする。
【解決手段】テンプレートマッチングが成功して先行車両の追跡が継続されるごとに、新規追跡画像を重ねて合成していくことで新たに合成画像を生成していくとともに、新たに合成画像を生成する場合には、過去合成画像に追跡の継続回数に応じた重みを付けながら、新規追跡画像を重ねてさらに合成していく画像重畳合成部25と、画像重畳合成部25で生成された合成画像に対してエッジ検出を行って、先行車両の端部の位置を決定する車両端決定部27と、車両端決定部27で決定した端部の位置をもとに、テンプレートを更新するテンプレート更新部28とを備え、テンプレートを更新した場合は、更新後のテンプレートとのテンプレートマッチングを繰り返すことで先行車両の追跡を行う。
(もっと読む)
3Dパターンマッチング方法
【課題】 レーザ計測等によって得られた3次元の点群データから対象物を精度よく検出する。
【解決手段】 レーザ計測によって得られた3次元の点群データに対して、ノイズを除去するためのリサンプリング処理を施す。そして、予め用意されたテンプレートとのマッチングを行う。テンプレートマッチングでは、まず、点群データおよびテンプレートを、共に所定サイズの格子に区切り、各格子内に存在するデータ点数をその格子の特徴量とする。こうして定義された特徴量に基づいて、点群データとテンプレートとを照合することによって、両者の位置関係、一致/不一致を比較的容易に判定することができる。テンプレートマッチングによって対象物が検出された後は、ICPマッチングによって、テンプレートと点群データとの位置関係をより精密に合致させ、対象物の検出を行う。
(もっと読む)
画像処理装置、画像処理プログラムおよび画像処理方法
【課題】位置合わせを正確に行うことができる画像処理装置を提供する。
【解決手段】画像間の位置合わせを行う画像処理装置であって、位置合わせ基準となる基準画像を決定する基準画像選択部2と、基準画像と、基準画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出すると共に、基準画像と位置合わせを行う参照画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出する鏡面ハイライト領域検出部3と、鏡面ハイライト領域の位置情報に基づいて少なくとも鏡面ハイライト領域に重みを設定する重み設定部4と、重みを用いて、基準画像と参照画像とのマッチングを行って位置ずれ量を算出する位置ずれ量算出部5とを備え、重み設定部4は、鏡面ハイライト領域、あるいは鏡面ハイライト領域および鏡面ハイライト領域の周辺領域の重みを、鏡面ハイライト領域、あるいは鏡面ハイライト領域および周辺領域以外の領域の重みよりも小さく設定する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 印刷に現れる特徴に基づいて個々の物品を識別することが可能な個体識別装置、個体識別方法、及びプログラムを提供する。
【解決手段】 個体識別装置1は、基準物品2の印刷部から読み取った画像(基準画像データ21)及び識別対象とする物品3の印刷部から読み取った画像(対象物画像データ31)を色分解し、各色の色分布データ2R,2G,2B(3R,3G,3B)から色毎の相関値を求める。対象物画像データの読取範囲Bは基準画像データの読取範囲Aより広い範囲とし、読み取った範囲Bから基準画像データと同一形状及び同一面積の領域33を切出し、切出し位置を順次移動させながら各切出し領域について各色の色分布データの相関値を求める。そして、相関値が最大となる切出し位置のばらつきが各色で所定許容範囲内に収まるか否かを判定し、収まる場合は同一個体と判定する。
(もっと読む)
41 - 60 / 808
[ Back to top ]