
国際特許分類[A61F2/68]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206)
国際特許分類[A61F2/68]の下位に属する分類
国際特許分類[A61F2/68]に分類される特許
51 - 60 / 65
腰部支援装置

【課題】上半身の自然な屈伸動作を阻むことなく、腰部の負担を軽減できるようにする。
【解決手段】上半身装着具2と、左右一対の大腿部装着具3と、上半身装着具2の左右両側位置と各大腿部装着具3の左右方向の外側位置とを繋ぐ左右一対の荷重伝達装置4とから腰部支援装置1を形成する。荷重伝達装置4は、前後方向に屈伸できる関節部5a,5b,5cを上下方向所要間隔で複数備え、各関節部5a,5b,5cに、屈曲状態を伸ばす方向へ力を付与する空気圧アクチュエータ6a,6b,6cを個別に備える。装着者7が上半身を屈めるときに、一緒に屈曲させられる各荷重伝達部材4を、各装着具2と3の間で突っ張るように作用させることで、装着者7の腰部に作用する荷重の一部を、上半身装着具2と荷重伝達装置4を介して大腿部装着具3を装着してある装着者7の大腿部で支持させる。
(もっと読む)
義足用エアシリンダ装置の内圧を確保する方法および装置

【課題】空気ばね作用を生ずべき室の内圧を有効に確保する。
【解決手段】義足用エアシリンダ装置110の作動時、クッション室83が負圧傾向になる。この発明では、その負圧と外気圧(大気圧)との差圧を利用し、クッション室83に差圧分の外気を導入する。そのため、クッション室83に対し、逆止弁95付きの新たな通路85を設ける。また、静止時の内圧を大気圧にするため、クッション室83に対し洩れ通路を設けるのが好ましい。洩れ通路として、たとえば、ピストンロッド周りのダストシール116の通気性を利用することができる。
(もっと読む)
義足足部
下腿部分のための接続部分(1)と、前足部分(6)とを有する義足足部であって、この前足部分は、接続部分(1)の角度位置が前足部分(6)の角度位置を制御するように、上側の連結要素(3)および下側の連結要素(8)によって接続部分と関節結合されており、これらの連結要素(3,8)のうちの一方が、足部の踵領域まで延びている。重量を足にかけるとき、足部の有効長が変化することを回避する。下側の連結要素(8)は、踵領域まで延びている。 (もっと読む)
人工の四肢の機能的な解析を実施するための方法
本発明は、人工の四肢(30)を備えた人のために機能的な解析を実施するための方法に係る。この人工の四肢は、基本的な機能を実行するためのセット(30)であって、少なくとも一つの取り外し可能な機能的部分(33)を備えたモジュール方式でデザインされ、特にこの部分が、付加的な機能を可能にする。複雑な外部の装置及び測定デバイスを使用することなく解析を実施するために、前記機能的部分の組み込みに関係する寸法に対応するサイズのセンサー・アセンブリ(33’)が、前記取り外し可能な機能的部分(33)の代わりに組み込まれる。前記センサー・アセンブリ(33’)は、次に、前記人工の四肢の基本的な機能のセッティングを最適化するために、前記人工の四肢(30)の使用中に発生する力、加速度および/またはトルクを測定する。前記センサー・アセンブリ(33’)は、その後で、前記機能的部分(33)で置き換えられ、最適化されたセッティングが維持される。 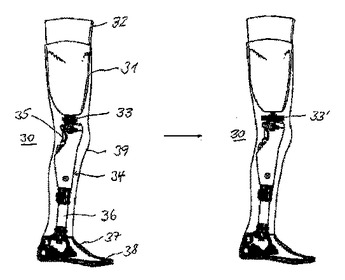 (もっと読む)
(もっと読む)
筋力補助装置
【課題】持ち上げる動作以外にも、力を入れる作業が存在し、例えば、椅子から立ち上がる動作時には膝や太腿の筋力を補助し、支える腕の筋力を補助する必要がある。また、筋力の補助において回転機による補助では、利用者の関節の可動域を超えた補助となる可能性が皆無でないため、安全性の高い筋力補助装置を提供する。
【解決手段】本発明の筋力補助装置は、利用者の人体を囲む外骨格と前記外骨格を利用者の人体に装着せしめる衣服部と前記外骨格を動作せしめるアクチュエータと前記アクチュエータを動作せしめる駆動源と前記駆動源を制御する機器を備えた筋力補助装置であるので、コンパクトに全身に装着することが可能な装具であり、アクチュエータを全身に配置することにより、課題であった全身の筋力の補助を行うことが可能となる。
(もっと読む)
筋力補助装置
【課題】 脚部の筋肉に加わる負荷が自然で、専門家を頼らずに手軽に使用できる筋力補助装置を提供する。
【解決手段】 脚部フレーム2と、この脚部フレーム2の足首に対応する箇所で回動可能に連結された足部フレーム3とを、複数の固定ベルト4で固定し、脚部フレーム2の上部に設けられた駆動制御部6と足部フレーム3の踵部とに連結リボン7を張り渡した。従って、足首が伸びるときに、連結リボン7の巻取動作を駆動制御部6で制御し、脹脛の筋肉収縮による足の動きとほぼ同じ動作をさせ、脹脛の筋肉に加わる負荷を自然な状態にすることができる。また、足部フレーム3の踵部分に設けられた第1圧力センサ8と、足部フレーム3のつま先部分に設けられた第2圧力センサ9とで検出された各圧力値に基づいて、駆動制御部6が連結リボン7の巻取動作を制御するので、連結リボン7の巻取制御が単純で、専門家を頼らずに手軽に使用することができる。
(もっと読む)
筋力補助装置
【課題】 衣服を着けるのと同時に装着でき、且つ機構部分が外部から見えないように隠すことができる筋力補助装置を提供する。
【解決手段】 ズボン2に第1〜第3アーム部材3〜5と駆動制御部14とを取り付け、これら第1〜第3アーム部材3〜5に第1、第2ジョイント部材12、13、第1〜第6ベルト6〜11、および第1、第2伝達ワイヤー15、16を組み付けた。従って、ズボン2をはくだけで、第1〜第3アーム部材3〜5と駆動制御部14とを身体に装着できるほか、第1〜第3アーム部材3〜5を回動可能に連結する第1、第2ジョイント部材12、13、および第1、第2伝達ワイヤー15、16などの機構部分をも同時に身体に着けることができる。また、この機構部分がカバー部材30によって開閉可能に覆われているので、機構部分が外部から見えないように隠すことができ、これにより見た目上、違和感なく日常生活を行うことができる。
(もっと読む)
補助装置
【課題】 身体に装着することが可能であり、使用時に使用者に違和感を与えることがない装着型パワーアシスト装置を提供する。
【解決手段】 アシスト装置10は、肘関節104の近位側身体である上腕100に装着する近位側装着部12と、肘関節104の遠位側身体である前腕102に装着する遠位側装着部14と、近位側装着部12と遠位側装着部14を夫々連結する連結機構部16と、モータ18等を備える。モータ18は肘関節104の回転軸Lからオフセットさせて上腕100の裏側に配置されている。これによりアシスト装置10の体側方向への張り出しを少なくできる。またモータ18の重心Gは上腕100の幅内に位置するように配置される。これにより上腕100を動かした際に、モータ18の自重によって肘関節104と上腕100にひねるようなモーメントが加わることを防止できる。よって使用時に使用者に違和感を与えることがない。
(もっと読む)
ヒト−外骨格システムのための外骨格制御装置
ヒト−外骨格システムのシステムパラメータを受信し、ヒト−外骨格システムの一般化座標を受信し、選択された力を補償するために外骨格アクチュエータの等価関節トルクを決定することによってヒト−外骨格システムの関節における外骨格アクチュエータを制御する技術が提供される。選択された重力及び外力の一部又は完全な補償を提供するので、本発明の一実施形態は、随意制御とアシスト制御との間の干渉の量を軽減し、それによって、ヒトが外骨格システムに素早く順応できるようになる。 (もっと読む)
気道移植装置、それを作製する方法および使用する方法
空気通路に開口部を維持および/または作り出すための気道移植装置が開示されている。前記装置を使用する方法もまた開示されている。気道移植装置は、空気通路の開口部を制御する変形可能な要素を含む。変形可能な要素は、電気活性高分子要素であることが好ましい。空気通路の壁が虚脱する場合、電気活性高分子要素に通電することにより、前記壁に支持を与え、したがって、完全にまたは部分的に空気通路を開く。気道移植装置を使用した、睡眠時無呼吸およびいびきなどの気道疾患を治療する方法が本出願で開示されている。  (もっと読む)
(もっと読む)
51 - 60 / 65
[ Back to top ]