
国際特許分類[A61F2/68]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 操作または制御手段 (206)
国際特許分類[A61F2/68]の下位に属する分類
国際特許分類[A61F2/68]に分類される特許
41 - 50 / 65
安全モードを有するアンテナシステム
本発明は、心臓ペースメーカ又は蝸牛インプラントのようなインプラント可能装置用のアンテナシステムASに関する。アンテナシステムは、「動作モード」及び「安全モード」のそれぞれに対応する直列又は逆直列でコイルユニットを選択的に接続し得る制御回路CCに対して、端子T11、T21、T12、T22を用いて結合される少なくとも2つのコイルユニットL1、L2を有する。動作モードにおいて、コイルユニットの磁気的に誘導された電圧U1、U2は加算し、その一方でこれらは、安全モードにおいて減算し、従って完全に又は部分的に補償する。したがって、例えばMRI検査の間に非常に大きな変化レートの外部磁場が存在するとき、インプラント可能装置は、これらによる損傷から保護され得る。  (もっと読む)
(もっと読む)
作業支援装置

【課題】作業者の身体に装着して関節回りの回動をアシストすることで該作業者の持上げ動作を支援する作業支援装置に対して、肩関節回りの回動又は肘関節回りの回動の一方のみを伴う持上げ動作時つまり肩関節及び肘関節の一方にのみ負担が集中するような持上げ動作を行う際の作業者の肉体的負担を確実に低減する。
【解決手段】動力源としての2つのモータ15,16を備えるとともに、肩関節及び肘関節のそれぞれに負担が分散されるような持上げ動作を行う際には、2つのモータ15,16のうちの一方を駆動してその動力でもって動作支援を行う一方、肩関節及び肘関節の一方にのみ負担が集中するような持上げ動作を行う際には、2つのモータ15,16を駆動して該両モータ15,16の動力でもって動作支援を行うようにする。
(もっと読む)
外骨格のアクチュエータを制御するシステム

【課題】制御信号源としてEMGを必要としない、能動挙動から生ずる多用途な支援を提供する外骨格制御方法を提供する。
【解決手段】外骨格に能動インピーダンスを表示させることが可能な制御装置付の外骨格を使用することによってユーザを支援するシステム及び方法を提供する。外骨格は、ユーザが下肢を動かすために必要とする筋負担を減少することによって、ユーザを支援する。ある実施形態においては、単一自由度(1−DOF)の外骨格は、能動インピーダンス制御装置を使用する単一関節動作によってユーザを支援する。他の実施形態においては、複数自由度(multi−DOF)外骨格は、能動インピーダンス制御装置を使用する複数関節動作によってユーザを支援する。
(もっと読む)
生物の動きを追うためのデバイス及び方法
システムは、動きの位置を測定するセンサ(1)と、センサからの信号を全ての動きの状態変数に変換する人工制御装置(3)(参照モデルから取り出された結果によって、センサの信号から直接取り出されたこれらの変数を推定するため、連続的な調整を実行することによって、参照モデルに関連付けられた)とを具備する。動きを完全なものにするために提供される制御は、システムからの支援なしで実行された部分と良好に同期する。特に、障害のある脚を持つ人の歩行を再現又は完全なものにするために適用される。 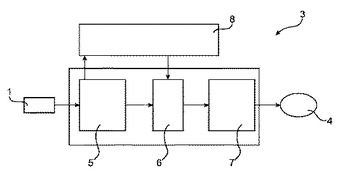 (もっと読む)
(もっと読む)
磁場応答固体高分子複合体およびアクチュエータ素子
【課題】柔軟性に優れ、大きく湾曲および変形しうる超小型アクチュエータ素子を提供することを主な目的とする。
【解決手段】固体高分子イオン交換膜の少なくとも一方の表面に強磁性体材料層を備えた磁場応答固体高分子複合体;固体高分子イオン交換膜の少なくとも一方の表面に強磁性体材料層を備えた磁場応答固体高分子複合体を用いるアクチュエータ素子材料、人体外からの磁場照射により駆動される磁場応答カテーテル材料或いは磁場センサによる先端位置センシング材料;および強磁性体材料イオンを含む水溶液に固体高分子イオン交換膜を浸漬して、当該強磁性体材料をイオン交換吸着させた後、還元処理することを特徴とする磁場応答固体高分子複合体の製造方法。
(もっと読む)
筋力補助装置
【課題】筋負担を装着者の姿勢や姿勢変化の如何によらずに適切に軽減し、特に、農作業等における屈んだ姿勢や中腰での作業の軽労化を図ること。
【解決手段】長手方向の一端部側の部位を人の肩部に装着され、長手方向の他端部側の部位を前記人の下半身に装着されて前記人の背部に沿って延在する弾性体41と、前記人の上半身の曲げ状態を検出する曲げセンサ21と、弾性体41を当該弾性体41の長手方向に伸長させる電動式ワイヤ巻取器14と、曲げセンサ21の検出結果に応じて電動式ワイヤ巻取器14による弾性体41の伸長量を制御する制御ユニット30とを設ける。
(もっと読む)
歩行補助装置
【課題】脚リンクの第1関節部回りの慣性モーメントを低減して利用者の脚に作用する負荷を軽減できるようにした歩行補助装置を提供する。
【解決手段】脚リンク5は、荷重伝達部に第1関節部3を介して連結される上方の第1リンク部6と、足平装着部2に第2関節部4を介して連結される下方の第2リンク部7と、第1関節部と第2関節部との間の距離が可変するように第1リンク部と第2リンク部とを連結する中間の第3関節部8と、第3関節部を駆動する駆動源9とで構成され、第1リンク部6の第3関節部8より上方部分に駆動源9を配置して、脚リンク5全体の重心を第3関節部8より上方に位置させる。また、駆動源9が電動モータ91と減速機92とで構成される場合は、電動モータ91を減速機92より上方に配置する。
(もっと読む)
接地圧力を皮膚触覚に伝達する機構を有する義足・下肢装具・靴
【課題】足底接地面の接地圧力の有無、分布、大きさを下肢障害者及び視覚障害者の皮膚触覚に伝達する義足、下肢装具、靴を提供する。
【解決手段】義足・下肢装具・靴の足底接地面に圧力入力装置9を配置し、皮膚刺激装置12に該出力を皮膚触覚に提示しうる身体部位に配置し、圧力入力装置9と皮膚刺激装置12を接続手段にて接続することにより、圧力入力装置9から入力された足底圧力に応じた刺激を、皮膚刺激装置12からの出力にて皮膚触覚に伝達する。
(もっと読む)
動作補助装置及びその制御方法
【課題】
操作性が高く、簡便に利用することができる動作補助装置、及びその制御方法を提供する。
【解決手段】
本発明にかかる動作補助装置は、使用者200の動作を補助する動作補助装置100であって、使用者200の眼球に光を照射する光源と、眼球で反射された前記光源からの光を検出する光検出器とを有する視線計測装置10と、視線計測装置10での計測結果に基づいて、使用者200の動作を補助する動作補助機構30とを備えたものである。
(もっと読む)
調整可能な制動機能でパッシブな人工膝関節を制御する方法
本発明は、屈曲方向および伸展方向において調整可能な制動機能でパッシブな人工膝関節を制御する方法であって、人工膝関節に取り付けられている、上側の接続手段と、人工足部へ通じる結合要素と、を有する補装具手段を階段上りに適合させるための方法に関する。本発明に係わる方法は、以下の段階、すなわち、人工足部の低いトルクの持ち上げを検出する過程、および持ち上げ期において、屈曲制動を、平面歩行のために適切であるレベルより下に減少させる過程を有する。 (もっと読む)
41 - 50 / 65
[ Back to top ]