
国際特許分類[A61H3/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875)
国際特許分類[A61H3/00]の下位に属する分類
松葉づえ (51)
病人または身体障害者のための車輪のついた歩行補助具 (197)
盲目者のための歩行補助具 (65)
国際特許分類[A61H3/00]に分類される特許
481 - 490 / 562
補助装置
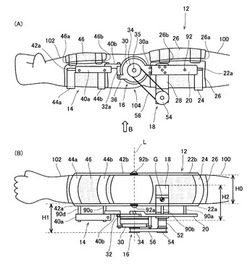
【課題】 身体に装着することが可能であり、使用時に使用者に違和感を与えることがない装着型パワーアシスト装置を提供する。
【解決手段】 アシスト装置10は、肘関節104の近位側身体である上腕100に装着する近位側装着部12と、肘関節104の遠位側身体である前腕102に装着する遠位側装着部14と、近位側装着部12と遠位側装着部14を夫々連結する連結機構部16と、モータ18等を備える。モータ18は肘関節104の回転軸Lからオフセットさせて上腕100の裏側に配置されている。これによりアシスト装置10の体側方向への張り出しを少なくできる。またモータ18の重心Gは上腕100の幅内に位置するように配置される。これにより上腕100を動かした際に、モータ18の自重によって肘関節104と上腕100にひねるようなモーメントが加わることを防止できる。よって使用時に使用者に違和感を与えることがない。
(もっと読む)
歩行補助装置

【課題】荷重伝達部1に第1関節部3を介して連結される脚リンク2L,2Rを備える歩行補助装置であって、各脚リンクは、中間の第2関節部5で屈伸自在であり、且つ、脚リンクの前後方向の揺動支点3aと脚リンクの下端の第3関節部7とを結ぶ線を基準線L2として、利用者の直立状態においても、第2関節部が基準線の前方に張り出す屈曲状態になるような長さに形成されるものにおいて、利用者の直立状態で脚リンクに発生する前傾方向のモーメントを減少させて、安定性を向上させる。
【解決手段】各脚リンク2L,2Rに、基準線L2に対し第2関節部5とは前後方向反対側に張り出す張出し部42を設け、ここに第2関節部5用の駆動源9搭載して、基準線L2の前後の重量バランスを取る。駆動源9の駆動力は駆動力伝達手段91を介して第2関節部5に伝達する。
(もっと読む)
歩行補助装置
【課題】利用者の各脚の運動状態によらずに利用者の負担を適切に軽減することができる歩行補助装置を提供する。
【解決手段】歩行補助装置1は、利用者Aの腰部に装着される体装着部2と、各足平に装着される足平装着部3L,3Rと、各足平装着部3を体装着部2に連結する脚リンク4L,4Rとを備える。各足平装着部3には、床反力センサ13が設けられ、これにより検出される床反力ベクトル(3次元ベクトル)の絶対値に所定の比率を乗じたものを各脚リンク4に足平装着部3から伝達される支持力の大きさの目標値とする。この目標値の大きさの支持力が脚リンク4に足平装着部3から関節19を介して作用するように各脚リンク4のアクチュエータ20を制御する。
(もっと読む)
杖
【課題】
石突が滑りにくく、安全な歩行に効果的な杖を提供する。
【解決手段】
棒状の杖本体1と、前後方向に二本の脚3,4を備えた脚体2とで構成する。杖本体1と脚体2は、脚体2の二本の脚の中間位置において杖本体1の先端を脚体2に軸支する。杖本体1基端の把持部6を持って、杖本体1の先端を前方に突き出すと、二本の脚3,4の石突8,9がそれぞれ路面に対して正対状態で接地するため、滑りにくく脚体2全体が安定する。杖本体1の把持部6を握って歩行を続けると、杖本体1は歩行の進行方向にのみ回動し、横方向には倒れないため、安定した歩行を助ける。
(もっと読む)
歩行補助装置
【課題】下端に接地部材6が連結された1つ以上の脚リンク2L,2Rと、脚リンクの上端に連結される荷重伝達部とを備え、利用者の体重の少なくとも一部を荷重伝達部を介して脚リンクで支えるようにした歩行補助装置において、利用者の束縛感を軽減すると共に歩行時の自由な腕振りを可能にし、且つ、小型化して使い勝手を良くする。
【解決手段】荷重伝達部を、利用者が跨ぐようにして着座する着座部材1で構成する。着座部材1の下面に、脚リンク2L,2Rの上端を連結する連結部3を設ける。連結部3は、脚リンク2L,2Rの前後方向及び横方向の揺動を許容する自由度を持つように構成される。
(もっと読む)
棒状部材の伸縮機構及び人体移動介助装置
【課題】任意の長さに調節することが可能であり、しかも容易に調節することが出来る棒状部材の伸縮機構、及びこれを備える人体移動介助装置の提供。
【解決手段】棒状部材の伸縮機構1は、角筒部2、角棒部3、ピン4、当接部5、化粧ナット6、カム部7、カム受け部8及び受け部収納部9を備える。角棒部3が角筒部2の任意の位置にあるときに、カム部7のレバー部7dが回転させられると軸支持部7cが回転し、この回転に伴って、軸部7bは角筒部2の外側へ移動する。この移動に従って、軸部7bに支持されたピン4も移動するので、ピン4の他端側に取り付けられた当接部5が角棒部3を押圧し、角棒部3の外面が角筒部2の内面を押圧し、角棒部3が角筒部2に対して固定される。
(もっと読む)
プラスチック製短下肢装具
【課題】足底板部の垂下を調整自在とするプラスチック製短下肢装具を提供する。
【解決手段】装具本体を足底板部2とこれに連続し立ち上がる後面支柱部3とし、該後面支柱部3を踵受け切り欠き6より上端まで達する縦二つ割り溝4で左右に分けてなる開放型分割後面支柱部8とし、この分割後面支柱部8の両脹脛受け部7に取付ける装着兼締付ベルト9をの締付けで縦二つ割り溝の溝間隔sを設定し、脚脹脛部の形状に見合う所望の両脹脛受け部分7aを構成し、また足底板部2の両側に底面より両側に突設する甲締めベルト10を、固定の面ファスナー11に対し着脱係合を自在にし突出角度を決め、足甲の形状に対応する甲掛けを行う。
(もっと読む)
発光機能付き歩行補助具
【課題】 電池の交換を不要にし、歩行障害者の歩行の安全や、歩行補助具の夜間の視認を容易にする発光機能付き歩行補助具を提供する。
【解決手段】 歩行を補助する松葉杖11を備える発光機能付き松葉杖11であって、松葉杖11が振り動かされたときに電気を発生する発電装置(発電部31および電源回路32)と、この発電装置の電気で点灯する照明灯とを備え、また、松葉杖11が押されたときに電気を発生する発電装置(圧電素子21および電源回路22、圧電素子41および電源回路42)と、この発電装置の電気で点灯する表示灯23、43とを備える。
(もっと読む)
歩行補助装置の制御装置および制御プログラム
【課題】利用者の各脚への装着部位を少なくしつつ、利用者自身がその脚で床に支えるべき力を軽減すると共に、その軽減のための補助力を利用者の各脚に対応する脚リンクで適切に分担することを可能とする歩行補助装置の制御装置を提供する。
【解決手段】着座部22から利用者Aに作用させる目標持ち上げ力を設定し、その目標持ち上げ力を、力センサ38,39の出力を基に計測した利用者Aの各脚の踏力の比率に応じて歩行補助装置1の各脚リンク3に分配して、各脚リンクの負担分を決定する。決定した負担分の力を発生させるように各脚リンク3のアクチュエータ27を制御する。
(もっと読む)
伸縮型直動アクチュエータによって構成される可動トラス型モジュールロボット
【課題】 既存のロボットやモジュールロボットの潜在的な機能的制約を解決する。
【解決手段】 構成単位を伸縮型直動アクチュエータとし、伸縮可能な梁型のモジュールを結合することで静的なトラスを動的な骨格としたことを特徴とするモジュールロボットを構成する。
(もっと読む)
481 - 490 / 562
[ Back to top ]