
国際特許分類[A61H3/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875)
国際特許分類[A61H3/00]の下位に属する分類
松葉づえ (51)
病人または身体障害者のための車輪のついた歩行補助具 (197)
盲目者のための歩行補助具 (65)
国際特許分類[A61H3/00]に分類される特許
501 - 510 / 562
歩行補助装置及びリハビリテーションシステム
【課題】 脳の病気や怪我によって半身が不随となった片麻痺の障害者に対して、正常な半身の動きを考慮することにより、その障害者に応じた歩行補助を提供することができる歩行補助装置及びリハビリテーションシステムの提供。
【解決手段】 一方の脚部が健常で他方の脚部が麻痺や障害を有する片麻痺の障害者に装着する歩行補助装置であって、前記健常脚部に装着されるとともに該健常脚部の運動を検出する脚部センサと、前記障害脚部に装着されるとともに該障害脚部を運動させる駆動手段と、前記脚部センサに於いて検出される前記健常脚部の運動に応じるように前記駆動手段を駆動させる駆動制御手段を有することを特徴とする。
(もっと読む)
保持器具
【解決手段】本発明は,使用者がハンドルを握ることができるように,使用者の手首に着脱自在に取り付けられる保持器具(10)に関するものである。保持器具(10)は,両端部(14,16)を有する,手首に巻き付けられる伸長したベルト部位(12),およびベルト部(12)から外に伸長する保持構造部(18)を有するものである。  (もっと読む)
(もっと読む)
移動障害者用イングリッシュ歩行ステッキ
移動障害者用イングリッシュ(T字)ステッキにおいて、牽引荷重と推進荷重を伝達するのに適切なリニアアクチュエーター(7)を内部部品として成り、一方では歯形面とは反対側の面にそれぞれ一定の間隔を置いたパッド(19、19′)をそれぞれ備えた一対の歯形ベルト(18、18′)を持ち、他方では前記一対の歯形ベルト(18、18′)の反対側に置かれ、前記歯形ベルト(18、18′)の前記パッド(19、19′)が互いに噛み合うことを可能にする作動手段と協動する駆動部材(11、11′)を持ち、結果として前記ベルトは、駆動部材(11、11′)の片側或いは上向きの第一ベルト長の部分においては可撓性があり、互に独立しているが、駆動部材(11、11′)の反対側或いは下向きの第二ベルト長部分においては、該ベルトは堅固に取り付けられ推進荷重と同様に牽引荷重を伝達するのに適した完全に堅固な棒として直線的に伸びる。  (もっと読む)
(もっと読む)
永久磁石を嵌め込んだ磁気伝達把持部

【課題】 多数の粒状の永久磁石を任意に嵌め込んだ磁気伝達把持部を提供する。
【解決手段】 把持部の各面に小穴を多数かつ任意位置に穿ち、その小穴に粒状の永久磁石を嵌め込み、接着液にて固定したことを特徴とする磁気伝達把持部。
(もっと読む)
歩行補助具
【課題】身体の足部側面に装着することにより、歩行時の体重を支持して足腰への負担を軽減することができ、足腰に負担がかかると通常の歩行が思うようにいかない人が、両手を開放した状態で通常に近い歩行が可能となる歩行補助具を提供する。
【解決手段】腰部ベルト2に取付ける腰部材3に上部脚部材5を第一の関節4で接続し、この上部脚部材5の下端に下部脚部材8を第二の関節6で接続し、腰部材3と上部脚部材5及び下部脚部材8の伸直状態で足腰に負担がかからないように体重を支持する。
(もっと読む)
自立構造を持つ杖
【課題】本発明は、他の支えを必要とせずに自立することができる杖を提供すること。
【解決手段】握り部2aにスイッチ2cを備えた操作部2と先端部4を連結し、内部にモーターの動力を変換する変換部からなる駆動部を内包した筒体3と、上下面板5a5bを連結する略長方形状の4枚のガイド板5cと、ガイド板5cの中央に備えられ外周面にネジ山が施されたガイド棒5e、平板状の上脚部7aと下脚部7bの一端同士を回動可能に連結し、上下脚部7a7bを開脚したり、折り畳むことができ、自立構造にすることができる。
(もっと読む)
歩行補助装置
【課題】例えば歩行に難を有する人間の歩行を支援する歩行補助装置において、広い設置スペースを必要とすることなく、使い勝手を良くする。
【解決手段】床面1から立ち上がる側壁面2に床面1と略平行に設けられるガイドレール10と、ガイドレール10にその長手方向に沿って移動可能に取り付けられるスライダ20と、スライダ20に一端が取り付けられて片持ち梁状に支持されるアシストバー30とを含む。アシストバー30は、少なくとも人間の両手を横並びに配置した状態で掴める長さに設定されていて、床面1に対し略平行でかつガイドレール10の長手方向に対し略直交する横向き姿勢とされている。
(もっと読む)
転倒防止靴、及び歩行型ロボット
【課題】 ソールの滑りの発生を検知し、滑りの状態に応じてソールの形状を変化させることにより、転倒を防止することができる転倒防止靴、及び歩行型ロボットを提供する。
【解決手段】 複数の突起物を一面に備えた移動板13と、移動板13を上下動させるアクチュエータ15と、地面とソール11の底面との間に滑りが生じたか否かを判断するために必要な情報を検出する滑りセンサ16と、地面とソール11の底面との間に滑りが生じたか否かを判断し、アクチュエータ15の動作を制御する制御装置17とをソール11の底面側に設けてある溝部20に備え、制御装置17は、滑りセンサ16で検出した情報に基づいて滑りが生じたと判断した場合、アクチュエータ15へ移動板13を下方へ移動させる指示信号を送出する。
(もっと読む)
転倒しにくい杖
【課題】 物や身体に立て掛ける等した場合に転倒しにくい杖を提供すること。
【解決手段】 本杖はその表面に滑り止め材が被覆されており、基材と一体成型されていることを主たる構成とする。該滑り止め材は、杖の握り部1全体の表面に被覆することも、また杖の柄部2下端の杖先ゴムキャップ取り付け部を除いた柄部2全体の表面に被覆することも、またそのいずれにも被覆するものとすることもできる。柄部2の横断面形状は、四角形等の線接触ないし回転抵抗のある形状とする。
(もっと読む)
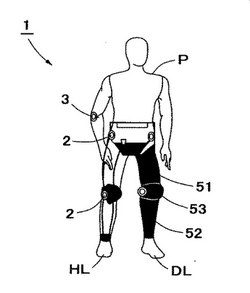
短下肢装具の能動的制御
ヒト−外骨格システムのシステムパラメータを受信し、足の向き等といったヒト−外骨格システムの一般化座標を受信し、短下肢装具を制御するための関節トルクを決定することにより足に作用する力の一以上の成分を補償することによって、短下肢装具を備えるヒト−外骨格システムを制御する技術が提供される。補償のために選択された力は、床反力等といった外力に加えて、重力を含む。回転軸まわりで足に作用する力の部分的又は完全な補償のための足首関節トルクを決定する技術が提供される。本発明の一実施形態は、随意制御とアシスト制御との間の干渉の量を軽減し、それによって、ヒトが外骨格システムに素早く順応できるようになる。 (もっと読む)
501 - 510 / 562
[ Back to top ]