
国際特許分類[B23P19/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498)
国際特許分類[B23P19/00]の下位に属する分類
プレスばめによる対象物結合用,またはプレスばめ取外し用 (303)
部品の組立て用,または分解用 (562)
結合する部品を整列させる
国際特許分類[B23P19/00]に分類される特許
121 - 130 / 633
ワーク取出し・供給装置
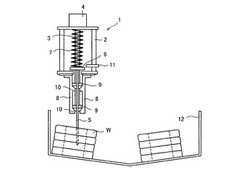
【課題】 シンプルな構造で確実に環状ワークを把持することができるワーク取出し・供給装置を提供する。
【解決手段】 ワーク把持治具1はフレーム2にガイドパイプ3を取り付け、ガイドパイプ3内に芯出しシャフト5を挿通し、このシャフト5に固着したフランジ6をガイドパイプ3の外側に設けたスプリング7によって突出方向に付勢している。前記フレーム2の下面にはフィンガー8が設けられている。このフィンガー8は例えば3本周方向に等間隔で設けられ、前記シャフト5の軸方向と直交する径方向に開閉自在とされ且つ図示しないスプリングによって閉じ方向に付勢されている。そして、3本のフィンガー8の開閉中心と前記シャフト5とが一致するように設定されている。
(もっと読む)
部品組付け装置及び方法

【課題】部品組付け装置の小型化、設置面積の省スペース化、組付け精度の高精度化を図りつつ、種類の異なる組付け対象物において組付けを行えるようにする。
【解決手段】組付け対象物を保持して搬送しつつ作業位置に位置決めする搬送ユニット20、作業位置にある組付け対象物の組付け位置に下方から対応する部品供給位置を画定して部品を供給し位置決めする部品供給ユニット50、作業位置にある組付け対象物の組付け位置に上方から対応する待機位置と部品供給位置との間で昇降自在に支持されて部品を受け取って組付け対象物に組み付け組付けツール31〜33をもつ組付けユニット30、組付けツールが部品供給位置にある部品を受け取り作業位置にある組付け対象物に組付けるべく組付けユニットを昇降駆動する昇降駆動ユニット40を含む。これによれば、構造の簡素化、構造の集約化、装置の設置面積の省スペース化等を達成できる。
(もっと読む)
加工システム
【課題】搬送レール等の軌道部材を用いることなく床面に設定した走行経路を搬送装置に走行させる無軌道型搬送システムを用いるとともに、走行経路に沿って配置された各工作機械に対する搬送装置の位置を、より高精度に位置決めすることが可能な加工システムを提供する。
【解決手段】搬送装置20は、走行経路R1に沿って床面F上にて走行及び停止可能な台車21と、ワークWの搬入または搬出を行うロボット22と、工作機械MCnに設けられた被連結手段CM(または連結手段CA)と連結可能な連結手段CA(または被連結手段CM)とを備え、工作機械には、自己の搬入・搬出位置に到達した搬送装置の連結手段と連結可能な位置に被連結手段が設けられており、搬送装置は、任意の工作機械の搬入・搬出位置に到達すると、連結手段と被連結手段を連結し、工作機械に対するロボットの相対位置及び相対方向を補正した後、ワークの搬入またはワークの搬出を行う。
(もっと読む)
ナットピッチ設定装置
【課題】ナット孔間のピッチ設定を容易に行うことのできるナットピッチ設定装置を提供する。
【解決手段】フレーム11に装着された複数のナット12に、複数のボルト孔13aの形成された外装板13がボルト14にて固定されて成る箱体10を形成する際に、複数のナット12のネジ孔12a間ピッチを設定するためのナットピッチ設定装置において、細長の本体部110と、本体部110の長手方向に移動可能であり、本体部110の長手方向に交差する方向に突出して、ボルト孔13aおよびネジ孔12aに挿入可能な第1突出部120、第2突出部140と、本体部110に対する第1突出部120、第2突出部140の位置を固定する第1固定部130、第2固定部150と、本体部110の長手方向の一端側に設けられて、第1突出部120、第2突出部140の基準位置を形成する基準部160とを設ける。
(もっと読む)
突起付き部品の供給装置
【課題】仮止室に開口しているガイド孔に突起付き部品が干渉することのない突起付き部品の供給装置の提供。
【解決手段】仮止室7に進入してきた突起付きの部品1を一時係止するとともに、供給ロッドのガイド孔12が仮止室7に開口し、部品1を供給ロッドに保持して目的箇所へ供給する形式のものにおいて、部品供給通路6の内面に連続する仮止室7の内面26に切欠き部32を設け、開口部の開口縁35がストッパ部材9に近い側の方がストッパ部材9から遠い側よりも供給ロッドの後退側に位置づけられていることにより、突起4の通過空間34が形成されている。
(もっと読む)
カム装置
【課題】カムレバーの運動の変更を容易に実現するカム装置を提供すること。
【解決手段】カム装置10,20が、回転駆動されるカム板(11,21)11,21と、接触子13,23を有するカムレバー14,24と、接触子13,23を移動させてカム面12,22に接触させると共にカム面から離間させる接触子移動手段15,25とを具備する。カム面12,22は、円周方向で区画された複数のカム面区画から構成され、接触子移動手段15,25は、カム板(11,21)の一回転の間に、接触子13,23,が複数のカム面区画の特定のものには接触するが、他のカム面区画からは離間するように接触子13,23を移動させる。
(もっと読む)
部品組立方法および部品組立装置
【課題】組立パレットの姿勢が傾いていてもその傾いた組立パレット上の第1の部品に第2の部品を組み立てることができる部品組立方法および部品組立装置を提供する。
【解決手段】 組立パレット10の上面に5つのLEDが配置されたLED基板120を設ける。このLED基板の表面に4個のLED121が置かれ、もう1個のLED122は、その4個のLEDが置かれた面から垂直方向に離れた位置に置かれている。カメラ30を、このLED基板120の表面への垂線Pから離れた位置において、その位置に置いたカメラ30からLED121,122を撮影し撮影画像に基づいて位置・姿勢認識部で位置・姿勢を認識し、さらに位置・姿勢算出部51でLED基板120の3次元座標を算出する。これにより組立パレットが傾いていてもその傾いた組立パレット上の第1の部品に第2の部品を精度良く組み付けることを可能にする。
(もっと読む)
回転体組付け用治具およびそれを用いた回転体組付け方法
【課題】所定の支持体において回転自在に支持される回転体が、被組付体に対して回転方向の位相を合わせた状態で組み付けられる構成において、位相合わせ作業を無くすことができ、作業性の向上および作業の均一化を図ることができる回転体組付け用治具を提供すること。
【解決手段】所定の支持体において回転自在に支持される回転体を、被組付体に対して、回転体の回転位相を合わせた状態で組み付けるための治具10であって、円柱状の外形を有する本体部11と、本体部11を被組付体に対して所定の姿勢で支持するとともに回転方向について位置決めするための位置決め支持部12と、本体部11の外周面11aにらせん状に形成され、回転体の位置決め支持部12側への移動にともない、回転体を被組付体に対する回転位相が合うように回転させる回転案内部13と、回転体に挿入されるとともに回転案内部13が係合するように回転体を導く挿入部14とを備える。
(もっと読む)
バッテリパックの組み立て設備
【課題】バッテリパックの製造コストおよび重量の低減が図られるバッテリパックの組み立て設備、を提供する。
【解決手段】バッテリパックの組み立て設備は、バッテリスタック50にロアケース61を組み付けるための設備である。組み立て設備は、バッテリスタック50を持ち上げるとともに、バッテリスタック50に対してロアケース61を仮保持するハンガー21と、ハンガー21に設けられ、バッテリスタック50に対してロアケース61を位置決めする位置決め機構31とを有する。
(もっと読む)
部品組付検査方法および部品組付検査装置
【課題】第1の部品に対して後から第2の部品を組み付けたときの組付け状態の良否を一回の撮影処理で正確に判定することができる部品組付検査方法および部品組付検査装置を提供する。
【解決手段】予め固定された第2の部品11に第1の部品10が組み付けられた後、撮影制御の制御の下に第1の部品10の上面にある4個のLED101を計測用のカメラ2で撮影する。位置・姿勢演算部21はそのカメラ2で撮影された4個のLED101のうちの3つのLED101の撮影画像を用いて各LED101の位置と3つのLED101を各々頂点とする三角形の平面の姿勢を算出する。その位置・姿勢演算部21の演算結果に基づいて第1の部品10の第2の部品11への組付状態の良否を判定する。
(もっと読む)
121 - 130 / 633
[ Back to top ]