
国際特許分類[B23P19/00]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 金属の他の加工;複合作業;万能工作機械 (3,247) | ある程度の変形を伴うかどうかに関わらず,金属部品または金属対象物,または金属と非金属とによりなる部品を単に一体に結合または分離するための機械 (1,498)
国際特許分類[B23P19/00]の下位に属する分類
プレスばめによる対象物結合用,またはプレスばめ取外し用 (303)
部品の組立て用,または分解用 (562)
結合する部品を整列させる
国際特許分類[B23P19/00]に分類される特許
81 - 90 / 633
電極受入孔への部品供給装置
【課題】簡素化された構造で電極の受入孔に軸状部品を正確に挿入することができる電極受入孔への部品供給装置の提供
【解決手段】軸状部品は、軸部と円形のフランジ部と溶着用突起から構成され、電極5の端面に受入孔が開口しており、この受入孔に軸部が挿入されるものであって、電極5の進退空間に対して進退するガイド部材23に軸部を受入孔に導くテーパ孔24が形成され、ガイド部材23は片側ガイド部材27と他側ガイド部材28に2分割された開閉構造とされ、所定位置に進出した片側ガイド部材27と他側ガイド部材28が閉じているときテーパ孔24と受入孔が同軸状態となるようにした。こうすることにより、軸部が確実に受入孔内に挿入される。
(もっと読む)
ワーク検出装置

【課題】光源からワークまでの距離が変化する場合であっても、ワークの材質や仕様の判定を行うことができる。
【解決手段】表面の光の反射特性が異なるワーク3が複数積み重ねられ、ワーク3の取り出し毎に最上部に位置するワーク3の種類を判定するワーク検出装置1であって、ワーク3を載置するパレット6と、パレット6から所定距離隔てて配置されると共に、所定の光量でワークの表面を撮像するカメラ8−1、8−2と、ワーク3の種類及び積層高さに対応した複数のワーク3の基準画像を記憶するメモリ13と、カメラ8−1、8−2により撮像された撮像画像と基準画像との照合を行う画像処理装置9とを有することを特徴とする。
(もっと読む)
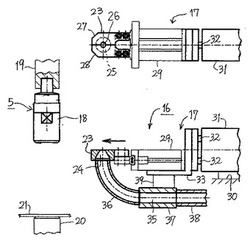
等速ジョイント用ローラ装着装置
【課題】スパイダのトラニオンに対し、ローラを自動的に装着し得る装置を構成する。
【解決手段】等速ジョイント用ローラ装着装置50は、円環形状体からなる基盤62と、該基盤62の略中心に配置された台座64と、この台座64を三方向から囲繞する3個のローラ保持具66a〜66cと、軸部としての位置合わせ用軸68を有する3個の位置合わせ具70a〜70cとを具備する装着用治具52を有する。ローラ保持具66a〜66c及び位置合わせ具70a〜70cは、台座64(スパイダ16)に対して接近・離間可能である。さらに、位置合わせ具70a〜70cの各々には位置合わせ用軸68が設けられている。この位置合わせ用軸68は、トラニオン28a〜28cの軸線方向に沿って延在し、位置合わせ具70a〜70cが前進動作した際には、ローラ保持具66a〜66cのポケット部96に収容されたローラ30a、30bに通される。
(もっと読む)
パイプ組立装置
【課題】 設計管製作用データに基づいてフランジ付き管を再現する、簡易型で小型軽量の安価なパイプ組立装置を提供する。
【解決手段】 ガスや水道などの流体の搬送に用いる直管や曲がり管を接続する接続管2のパイプの両端に接続用のフランジ3、4を電子データに基づいて再現精度良く溶接固定するパイプ組立装置1であって、パイプ組立装置1は、少なくとも一方が水平面上を互いに離間する方向に近接又は離反して移動可能な左右一対の第1、第2のフランジ位置決め機構5、6を備え、フランジ位置決め機構5、6は、フランジ3、4を固定してX方向に沿ってスライドさせるX方向スライド機構10を備えたフランジ載置台7、8と、フランジ載置台7、8を平面的に回動させるθ1方向回動機構11と、θ1方向回動機構11を垂直方向に回動させるθ2方向回動機構12と、θ2方向回動機構12を水平方向に回動させるθ3方向回動機構13と、を備える。
(もっと読む)
組付け搬送装置
【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
搬送パレット及び圧入装置
【課題】圧入対象部品を反転させることがなく、前記圧入対象部品に対して互いに反対方向から圧入部品を圧入することができ、組み立て作業全体を効率的且つ自動的に行うことを可能にする。
【解決手段】搬送パレット10は、貫通孔44が形成されるパレット部材30と、前記貫通孔44を閉塞して前記パレット部材30に移動可能に配置されるとともに、レゾルバ22が保持される圧入パンチプレート46と、前記圧入パンチプレート46に、前記パレット部材30とは反対側に配置され、圧入ステーションに配置されるヨークアセンブリに対向してロータを保持するワーク受け部材54とを備え、前記ロータには、前記レゾルバ22と前記ヨークアセンブリとが互いに反対方向から圧入される。
(もっと読む)
ロボット制御システムおよびロボット制御方法
【課題】ロボットの自動組立を継続して行う際に様々な要因によって生じ得る作業対象部品などの位置ずれによる「チョコ停」の未然防止を可能とするロボット制御システムおよびロボット制御方法を提供する。
【解決手段】ロボット制御方法の一実施形態では、X軸方向、Y軸方向および回転角θについて水平移動可能なX−Y−θステージ9上に載置された部品供給トレイ5に搭載された作業対象部品をロボットハンド31に取り付けられた小型カメラで撮像する。撮像された画像の画像処理によって、次の作業対象部品を検出して正確な位置を算出するとともに、正常位置データとの比較によって位置誤差を算出して、その位置誤差を補正するような指令をX−Y−θステージ9に与える。そのようにして位置誤差が補正された後に、次の作業対象部品に対する作業を実行する。
(もっと読む)
部品位置決め構造
【課題】極めて簡単な構造であって、部品の固定に際して作業者の習熟度に関係なく、高い精度で容易に部品を位置決め可能な部品位置決め構造を提供することを目的とする。
【解決手段】本発明にかかる部品位置決め構造100の代表的な構成は、部品120に設けられ平面110aと対向する所定の端部120aと、部品120に設けられ所定の端部120aに向かって下降するように傾斜した長孔122と、長孔122に挿入されて部品120を回転および摺動可能に支持する支持部材112であって、長孔122の一端から他端までの摺動の間に所定の端部120aが平面110aに接触する位置にある支持部材112と、を備え、重力の作用により部品120が平面110aに接近し、所定の端部120aが平面110aに接触することにより、部品120は平面110aに位置決めされることを特徴とする。
(もっと読む)
ワークの缶組みステージ
【課題】ワークを組み立てて、仮付けを行った後、そのままの状態で次のステージの直近位置までワークを移動させることによって、次のステージへの移載時にワークにダメージを与えないようにする。
【解決手段】ブーム1の缶組み及び仮付けする缶組みステージ10において、ガイドレール21に沿って自走する作業テーブル20にセンタブロック支持部材31及びボス部支持部部材32,33を装着する構成としており、缶組み位置P1において、作業テーブル20にセンタブロック2と、ボス部5,6を支持させて、缶組みされた状態で、作業テーブル20を溶接ステージ11,12と直近位置における移載位置P2まで自走させて、移載させるように構成している。
(もっと読む)
自動車ブレーキパッド用騒音防止板供給装置
【課題】自動車用ブレーキパッドの成形後の騷音を減少させるべく、バックプレートに樹脂類の騒音防止板を供給し、熱圧着・固定が行われるようにした装置において、騒音防止板30,40の供給のための作業労力と時間を節減するとともに、各種のアクセサリ組み付けのための装置の自動化を可能にするものを提供する。
【解決手段】積載機100に積載された騒音防止板30,40を昇降台170及び高さ感知センサ180によって引き出し可能な高さに上昇させ、続いて、移送機200の作動板240の吸着パッド250,260が騒音防止板を引き出して剥離機300に供給する。剥離機300の剥離ローラ330を通過する間に、騒音防止板30,40の剥離紙32,34が剥離されて排出板360上に排出される。姿勢感知器400による姿勢情報に基づいて作業用ロボット500のアーム520の吸着パッド580が騒音防止板30,40を吸着し、付近で待機しているブレーキパッド10,20のバックプレート上に供給する。
(もっと読む)
81 - 90 / 633
[ Back to top ]