
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
891 - 900 / 964
ロボット制御装置
制御の高度な知能化のために必要な画像などの大容量データを簡素な構造でリアルタイム性を確保しつつ扱うことのできるロボット制御装置を実現する。このため、制御対象(3)の動作制御を実現するための計算処理を行う動作制御手段(5)と、上記制御対象の作業・動作計画や外界認識を行う認識・計画手段(6)と、上記制御対象への指令を出力し、上記制御対象の状態を入力するための入出力インターフェース(4)と、上記動作制御手段と上記認識・計画手段と上記入出力インターフェースとの間の接続を切り換えることで通信を制御する経路選定手段(2)とを備えて、上記経路選定手段で、上記動作制御手段と上記認識・計画手段と上記入出力インターフェースとの間の接続を切り換えることで通信を制御しながら、上記制御対象の上記作業・動作計画及び上記外界認識の結果に基づいて上記制御対象であるロボットの動作を制御する。  (もっと読む)
(もっと読む)
産業用ロボットに使用されるドア開閉機構
ロボット塗装装置に使用されるドア開閉機構であって、この機構を使用してドア(7)の一部分(6)の位置を検出することにより、内部塗装のためにドアを開く、及び/又は閉じることができる。ドア開閉装置には、好適には垂直方向(Z)の磁界又は電磁界の磁界強度の変化を検出する少なくとも一つの非接触センサ部材(1)が配置される。また開閉装置には、衝突等を検出する複数のセンサを配置することができる。方法、システム、及びコンピュータプログラムも開示される。 (もっと読む)
ユーザ行動誘発システム及びその方法
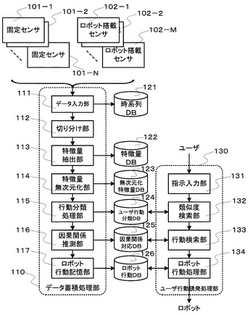
【課題】 ユーザに合わせた出力が可能であり、それぞれのユーザに適した誘発行動を実行することが可能となるユーザ行動誘発システム及びユーザ行動誘発方法を提供すること。
【解決手段】 本発明では、センサからユーザ及びロボットの行動データを入力するデータ入力部と、このデータ入力部で入力したユーザの行動データからユーザ行動の類似した行動毎に分類分けを行う行動分類処理部と、ロボットの行動データに対応する分類されたユーザ行動の発生確率を求める因果関係推測部と、誘発したいユーザ行動を入力する指示入力部と、分類されたユーザ行動から、誘発したいユーザ行動と類似したユーザ行動を検索する類似度検索部と、検索されたユーザ行動に対応するロボットの行動データの発生確率に基づいて、ロボットの行動データを抽出する行動検索部と、この抽出されたロボットの行動データをロボットに実行させるロボット行動処理部とを備える。
(もっと読む)
作業設備

【課題】 ワークの位置を常に正確に検出することができる作業用ロボットの制御装置を提供すること。
【解決手段】 作業設備Eは、ワークを搬送する搬送装置2と、この搬送装置2により搬送されるワークに対し作業を行う作業ロボット1とを備えている。搬送装置2は、搬送経路を規定するレール29と、ワークの一つに対して複数設定されレール29上を走行するトロリ22と、このトロリ22間を連結する連結バー23と、トロリ22または連結バー23上に固定されワークを位置決めした状態で載置可能な搬送台24と、少なくともトロリ22および連結バー23の移動量Sを検出するセンサ3とを備えている。作業ロボット1は、センサ3で検出したトロリ22および連結バー23の移動量Sに基づき制御されてワークに対し作業を行うように構成されている。
(もっと読む)
マニピュレータおよび容器整列装置
【課題】高剛性で作業速度も高く、動作制御も容易な作業用マニピュレータを提供する。
【解決手段】基端支持部4と手先部5との間に両端部がそれぞれ回動自在に連結された3本のリンクのうち、2本を互いに平行で同一長さに形成して第1平行リンク機構PL1を形成する第1動力伝達軸L1および第2動力伝達軸L2とし、残りの1本を、第1平行リンク機構PL1の面F0に直交する面内で、第1,第2動力伝達軸L1,L2と互いに平行で同一長さの第2平行リンク機構PL2を形成する駆動アームAとした。
(もっと読む)
関節角の受動変化を利用して歩行するロボットとその制御方法
【課題】 支持脚の足首関節を回転自由として受動的に動かして自然な動作で歩行するロボットにおいて、目標とする歩幅での歩行を実現することが可能な技術を提供する。
【解決手段】 本発明のロボットは、足首関節を持つ脚リンクが股関節によって胴部に揺動可能に連結されており、その脚リンクが2以上存在するロボットであって、接地脚リンクの足首関節を揺動自由とし、残余の関節を前記足首関節の角度に基づいて調整し、接地脚を入れ替える度に揺動自由とする足首関節を切替えるロボットである。体側方向の足踏み動作の周期に合わせて遊脚を振り出すことで前進する。揺動自由とした関節の関節角と、足踏み運動の周期に応じて胴部の傾きを調整し、目標とする歩幅で歩行する。
(もっと読む)
歩行パターン作成装置、2足歩行ロボット装置、歩行パターン作成方法、2足歩行ロボット装置の制御方法、プログラムおよび記録媒体
【課題】パラレルリンク機構の2足歩行ロボット装置に安定した2足歩行を行わせることができる歩行パターンを作成する歩行パターン作成装置を提供することを目的とする。
【解決手段】足部(足底部)を備えた脚部と腰部とから成る2足歩行ロボット装置の歩行パターンを作成する歩行パターン作成装置であって、足部において目標ゼロモーメントポイントを設定し、設定した目標ゼロモーメントポイントに応じて腰部のモーメント補償軌道を算出し、絶対座標系における腰座標系の原点と絶対座標系における足座標系の原点とから腰座標系から見た足部の位置を算出し、絶対座標系から見た足座標系の姿勢を表わす回転行列と絶対座標系から見た腰座標系の姿勢を表わす回転行列とから腰座標系から見た足座標系原点の姿勢を表わす回転行列を算出して足座標系原点の姿勢を表わす回転行列により足部の姿勢を算出する。
(もっと読む)
ロボット・シーム溶接方法と装置
【課題】大きな質量や体積のワークの自動シーム溶接を可能にするロボット・シーム溶接方法と装置を提供すること。
【解決手段】ロボット・シーム溶接装置は、多関節ロボット1と、このロボットに搭載した一対の回転電極輪3a,3bとを含む。これら電極輪は被溶接物7または17を挟み、ロボット1が予め教示された被溶接物の溶接線9に沿って電極輪3a,3bを移動させながら、電極輪に溶接電流を通して被溶接物のシーム溶接を行う。可動の被溶接物支持テーブル5,6が設けられ、溶接線が電極輪3a,3bの溶接動作範囲に入るように被溶接物7または17を動かす。
(もっと読む)
ICタグ管理装置、それを含むロボットおよびICタグ管理方法
【課題】 ICタグが付された物品の取り扱いにおいて、ICタグの情報が他人に把握されるのを防ぐとともに、ICタグの情報を有効に用いる。
【解決手段】 ICタグ管理装置100は、物品に付されたICタグからオリジナル情報を読み出す情報読出部102と、情報読出部102が読み出したオリジナル情報を所定のローカルルールに基づき、ローカルルール適用情報に変換する変換処理部104と、ローカルルール適用情報により、ICタグのオリジナル情報を書き換える情報書込部106と、を含む。
(もっと読む)
自動機械の制御装置及び制御方法
協調制御と独立制御を連続して動的に、同時に実行させることが可能なロボット制御装置を提供する。2台以上の自動機械(16)、(17)、(18)の互いの位置と速度を保ちつつ制御する協調制御手段(9)と、2台以上の自動機械(16)、(17)、(18)をそれぞれ独立に制御する独立制御手段(10)とを有し、予め記憶されている動作プログラム(2)に基づいて3台以上の自動機械を同時に制御する自動機械の制御装置において、協調制御手段(9)の対象とする自動機械を指定する協調制御指定手段(3)と、協調制御手段(9)と独立制御手段(10)とを同時に実行する同時実行制御手段(6)とを備える。  (もっと読む)
(もっと読む)
891 - 900 / 964
[ Back to top ]