
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
921 - 930 / 964
テキストビジュアル音声(TTVS)合成方法及びコンピュータで実行可能なプログラム

【課題】仮想的または物理的なロボットがあたかも実際に話しているかのように口を動かすために必要な情報を生成できるようにする。
【解決手段】 TTVS合成方法は、オーディオ音声単位特定マークとそのそれぞれの口の動きの軌跡パラメータとのマッピング(32)を確立するステップと、それぞれ継続時間長が付された音声単位特定マークのリストを準備するステップと、それぞれの継続時間長がリストで特定された、リスト中の各音声単位について、口の動きの軌跡を表すパラメータ(60)を連結するステップと、連結された口の動きの軌跡パラメータに従って、人工の口を駆動するための口駆動信号を発生するステップ(62)と、を含む。
(もっと読む)
ロボット装置及びそのコンテンツ管理方法

【課題】 取得したコンテンツをより生物的な方法により管理するロボット装置及びそのコンテンツ管理方法を提供する。
【解決手段】 要求モジュール10でコンテンツ要求が生成されると、取得モジュール20は、インターネット上でコンテンツを検索して取得し、フィルタユニット23は、管理モジュール30や内部状態モジュール50からの情報に基づいてそのコンテンツをフィルタリングする。コンテンツ多次元化ユニット26は、フィルタリングされたコンテンツを詳細レベル、要約レベル、存在レベル及び削除レベルの4つのレベルに変換してコンテンツ保存部40に保存する。ライフタイムユニット32は、保存されているコンテンツのライフタイムを監視する。コンテンツ削除ユニット33は、削除レベルとなったコンテンツ或いは重要度が低いコンテンツを削除すると共に、削除したコンテンツに関する情報をフィルタユニット23に登録させる。
(もっと読む)
ロボットシステム
【課題】 ロボットシステムにおいて、計算機にかかる負荷を軽減し、また特定自由度への外乱の影響を協調的に調整することを可能とし、全体としての移動運動などパフォーマンスを安定維持することができるようにする可能とする。
【解決手段】 個々にアクチュエータを備えた複数の構造体からなり、各アクチュエータの自由度毎に対応して設けた複数の計算機を備える。各アクチュエータの計算機は通信ネットワークを介して結合し他のアクチュエータのセンサ情報を含む他の計算機の内部状態を取得する。各計算機には、各自由度の運動制御のため非線形振動子モデルを備え、前記非線形振動子モデルは他の計算機からの周期パターン入力に対して、自律的に振動周期を合わせ、また結合係数により決まる位相差を協調的に生成する。また全てのネットワーク結合されている計算機内で共有されたメモリを個々に備え、常に通信を介して更新する。
(もっと読む)
顧客応対ロボット
【課題】多数の対象物についての鍵管理などを容易に行うようにした顧客応対ロボットを提供する。
【解決手段】周囲環境を移動可能なロボットであり、解錠あるいは施錠を必要とする複数の車についてそれぞれ設定された解錠あるいは施錠信号(キーn)群を記憶し、複数の車の中から顧客の指示を認識して解錠あるいは施錠を希望する車を特定し(S10からS16)、記憶された信号群の中から特定された車に対応する解錠あるいは施錠信号を検索し(S18)、キーレスエントリ装置を介して検索された信号を発信して特定された車を解錠あるいは施錠する(S20)。
(もっと読む)
多関節ロボットの制御装置
【課題】ロボット本体における軸順序(駆動軸の順序)と駆動装置における軸順序とを容易に入れ替え可能な、多関節ロボットの制御装置を提供する。
【解決手段】複数の駆動軸を有するロボット本体5を制御する多関節ロボットの制御装置11において、ロボット本体5における少なくとも位置および角度を算出するロボット機構計算部1と、ロボット本体が具備する複数の駆動軸の軸順序を入れ替え可能な軸入れ替え部2とを有し、前記軸入れ替え部2を介して前記ロボット機構計算部1によりロボット本体5が具備する複数の駆動軸を制御するようにした。これにより、従来使用していた駆動装置4を用いながらも、ロボット本体5における駆動軸間のサーボモータの入れ替えに容易に対処できるものとなる。
(もっと読む)
超柔軟身体を有するロボットシステム
【課題】使いやすい感覚系(センサ系)を備えた,無限次元の運動学的自由度を有する柔軟な身体をもつロボットシステムとその制御方法を提供する.
【解決手段】無限次元の運動学的自由度を有する身体と,上記身体に力を印加することのできるアクチュエータと,上記身体の特徴量を検出する内界センサと,上記センサからの情報から適切な制御入力を計算しアクチュエータに指令するコントローラと,から構成されるロボットシステムを構築する.
感覚系(センサ系)をうまく選択することで,超駆動系,超劣観測系でありながら,所望の作業を内界センサの情報のみで達成できる.
(もっと読む)
警備ロボット
【課題】車などの移動体に搭乗可能なロボットであって、ロボット自ら異常の度合を判定し、それに応じて動作するようにした警備ロボットを提供する。
【解決手段】加速度センサ(内界センサ)およびCCDカメラ、マイクロフォンなどの外界センサを備え、それらの出力から得られる情報に基づいて車Vに生じつつある異常の度合をSMALL,MEDIUM,LARGEと判定し(S10から16)、判定された異常の度合に応じて注意、警告、制止のいずれかからなる防止動作を行う(S18から28)。
(もっと読む)
対話型装置
生体センサを人体に装着することなく、ユーザの健康状態に応じた行動パターンを決定することが可能な対話型装置1を提供する。対話型装置1は、ユーザの健康状態を把握する把握手段50bと、ユーザの健康状態に応じた行動パターンを決定する行動パターン決定手段50cと、その行動パターンの実行を指示する実行指示手段50gと、その行動パターンの実行を指示する前に、その行動パターンをユーザに音声で提案する提案手段50eと、提案された行動パターンに対するユーザの返事が提案された行動パターンを受け入れるという返事か否かを判定する提案承諾判定手段50fとを備えている。実行指示手段50gは、ユーザの返事が提案された行動パターンを受け入れるという返事であると判定された場合に、提案された行動パターンの実行を指示する。 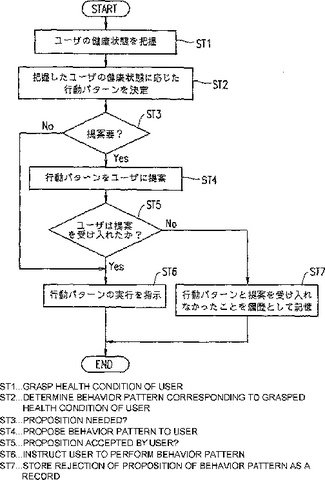 (もっと読む)
(もっと読む)
商品説明ロボット
【課題】車の販売において販売担当者の負担を軽減するようにした商品説明ロボットを提供する。
【解決手段】車の性能、仕様および操作の少なくともいずれかからなる商品説明を行う商品説明ロボットであって、外部に配置された、車のそれぞれについて商品説明を行うのに必要なデータを少なくとも含む情報を格納する情報格納サーバに無線装置を介してアクセスし、商品説明を行うべき対象車についてデータを入手し(S10からS16,S20からS26)、入手したデータに基づいて顧客に商品説明を実行する(S18,S28)。
(もっと読む)
人間型ロボットの制御装置
【課題】 物体を押しながら安定して歩容することができる人間型ロボットの制御装置を提供する。
【解決手段】 床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両脚が地面に着いた両脚支持期に対象物を押し、片脚のみが地面についた片脚支持期では対象物を押さない制御を行う制御手段を備える。また、床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両足が地面に着いた両脚支持期に手先反力を制御することにより対象物を押し、片足のみが地面に着いた片脚支持期では対象物を押すことなく、先に対象物を押した量だけステップする制御を行う。
(もっと読む)
921 - 930 / 964
[ Back to top ]