
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
931 - 940 / 964
通信方法、並びにロボットのタスク実行方法及び該システム
【課題】 サーバからのタスク実行依頼に基づきロボットがタスクを実行する上で、良好にサーバとロボット間の通信を行い、確実かつ円滑にタスクの実行処理を行うことを目的とする。
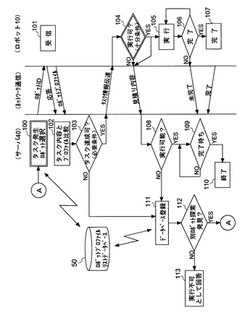
【解決手段】 通信機能を有するロボット10が、ネットワークを介したサーバ40からのタスク実行要求に基づきタスクを実行する方法において、前記サーバ40が、要求タスク情報と、ネットワーク30を介して前記ロボット10から取得した該ロボットのプロファイル情報とを比較して、要求タスクの実行可否の判定を行なう第1の判定ステップと、第1の判定ステップにより実行可能であると判定された場合に、ロボット10が前記サーバ40より要求タスク情報を受信して、該ロボット10のステイタス情報に基づき前記タスクの実行可否を判定する第2の判定ステップと、これらの判定結果を含む見積り情報をサーバに通知する見積り情報通知ステップと、を備えた。
(もっと読む)
人間型ロボットの制御装置

【課題】 物体を押しながら安定して歩容することができる人間型ロボットの制御装置を提供する。
【解決手段】 床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両脚が地面に着いた両脚支持期に対象物を押し、片脚のみが地面についた片脚支持期では対象物を押さない制御を行う制御手段を備える。また、床に置かれた対象物を継続的に押す人間型ロボットの制御装置において、両足が地面に着いた両脚支持期に手先反力を制御することにより対象物を押し、片足のみが地面に着いた片脚支持期では対象物を押すことなく、先に対象物を押した量だけステップする制御を行う。
(もっと読む)
駆動装置及びその駆動方法
【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
1つまたは複数のマニプレータを制御する制御システムおよび方法
【課題】1つまたは複数のマニプレータを制御する制御システムおよび方法
【解決手段】コンピュータ(4、6)と、ドライブユニット(8)とを備え、マニプレータ(2)を制御するマニプレータを制御する制御システムである。制御システムは、様々な機能を処理するように構成されている複数の独立したモジュール(12、14)を備え、モジュールの各々は、独自の電源を有し、他のモジュールの少なくとも1つと通信するように構成され、コンピュータ(4、6)およびドライブユニット(8)が、モジュールに配置されている。  (もっと読む)
(もっと読む)
ロボット装置の制御システム及び制御方法
【課題】 複数台のロボットが協調的に動作し、全体としてある特定の目的を実現するマルチロボット・システムに関する。
【解決手段】 マルチロボット・システムは、舞台上で活動する複数のロボットと、舞台上のロボットの動作を監視するモニタ・システムと、マルチロボットの運用を行なう統括コントローラで構成される。統括コントローラは、ロボットの状態と、モニタされた位置及び方向に基づいて、ロボットに対する動作指示や、ロボットに対する位置及び方向の補正指示、異常発生(若しくは予測)時におけるロボットへの動作指示を、無線LAN経由でリアルタイムに行なう。
(もっと読む)
ロボット装置及びその制御方法
【課題】
エンターテインメント性や有用性を向上させ得るロボット装置の制御方法を提案する。
【解決手段】
可動部を駆動する動力源としてのモータの回転を、実行すべき行動内容に応じて制御すると共に、当該モータの回転状態を検出し、検出したモータの回転状態に基づいて、可動部に作用する外力の大きさを推定し、外力の大きさの推定結果に基づいて、外力の大きさと、当該外力によるモータの回転状態の変位量とが予め設定された調整ゲインを比例定数とする比例関係となるように、モータの回転を制御し、状況に応じて、制御手段に設定された調整ゲインを変更するようにした。
(もっと読む)
ロボット、ヒント出力装置、ロボット制御システム、ロボット制御方法、ロボット制御プログラム及び集積回路
従来から、利用者を識別し、利用者毎に異なる行動パターンを取るペットロボットや、ペットロボット自身の行動履歴に基づいて、段階的に行動パターンを変化させ、成長の過程を演出するペットロボットが存在する。 本発明は、メモリカードを所持した利用者と接する際に、メモリカードから、メモリカードの識別情報、利用者に関する情報、利用者がロボットに接した履歴情報など、各種の情報を取得し、取得した情報を反映したする行動をすることで、利用者に、より高い満足感を与えることができるロボットを提供する。 (もっと読む)
角運動量の変化率に基づいて脚式ロボットを制御するためのシステム及び方法
ロボットのバランスを維持または改善するために脚式ロボットの重心の角運動量の変化率(HG)を用いるシステム及び方法が提示される。一実施形態において、制御システムは、現在のHGの値を決定し、この値を閾値と比較し、ロボットに送る指令を決定する。指令を実行することにより、ロボットは安定な状態を維持し、または、より安定になる。また、ロボットのバランスを維持または改善するためにHGから算出される値を用いるシステム及び方法が提示される。一実施形態において、制御システムは、角運動量の変化率がゼロである(ZRAM)点(A)を決定し、Aと合成地面反力の圧力中心の位置との間の距離を決定し、この値を閾値と比較し、ロボットに送る指令を決定する。  (もっと読む)
(もっと読む)
光学式触覚センサ、光学式触覚センサを利用したセンシング方法、センシングシステム、物体操作力制御方法、物体操作力制御装置、物体把持力制御装置及びロボットハンド
【課題】 製作が容易であり、小型化も容易な光学式触覚センサを提供する。また、1種類のセンサによって複数種類の力学量を同時に測定することが可能な光学式触覚センサを利用したセンシング方法、センシングシステム、物体操作力制御方法、物体操作力制御装置、物体把持力制御装置及びロボットハンドを提供する。
【解決手段】 光学式触覚センサ11は、タッチパッド12と、タッチパッド12の挙動を撮影するCCDカメラ13を備える。CPU23は、CCDカメラ13からの画像情報を画像処理し、接触領域A1の大きさ、形状及び重心に関する情報を抽出し、固着領域A2の大きさに関する情報を抽出する。CPU23は、接触領域A1の大きさから法線力を求め、接触領域A1の形状及び接触領域A1の重心から接線力を求め、接触領域A1の大きさに対する固着領域A2の大きさの割合から摩擦係数を求める。
(もっと読む)
データ更新システム、データ更新方法、およびデータ更新プログラム、ならびにロボットシステム
所定の機能を実現するプログラムを実行するロボットに含まれるサブシステム(110)は、ロボットの機能を拡張する拡張データを受信するデータ受信部(115)と、受信した拡張データを組み込むデータ組込部(116)と、所定の条件に対応するパスワードを出力するパスワード出力部(113)と、を含み、複数の拡張データを提供するサーバサブシステム(100)は、ユーザによるパスワードの入力を受け付ける端末通信部(101)と、受け付けたパスワードに対応する複数の拡張データを取得し、ユーザに提示する選択肢提示部(125)と、ユーザの選択を受け付けるデータ選択部(104)と、選択された拡張データをロボットサブシステム(110)に送信するデータ送信部(106)と、を含む。 (もっと読む)
931 - 940 / 964
[ Back to top ]