
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
951 - 960 / 964
移動体の制御装置
3つ以上の接地部位10を備える移動体1(移動ロボット)の接地部位10のそれぞれが葉ノードとなり、且つ、該葉ノードと該葉ノードのすべてを子孫ノードとして持つ根ノードとの間に中間ノードが存在するように接地部位10をツリー構造状に分類し、子ノードを持つ各ノード(第Cノード)に対し、少なくとも基体36などの所定部位の実
姿勢傾斜と目標姿勢傾斜との偏差(姿勢傾斜偏差)を0に近づけるように、第Cノードの接地部位10の目標相対高さの修正量を決定し、それらの修正量を合成してなる目標相対高さを満足するように移動体1の関節を動作させる。
(もっと読む)
関係検知システム
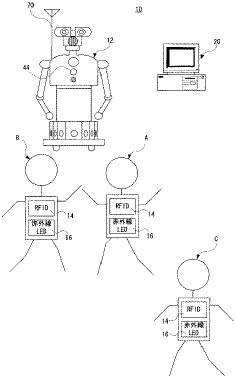
【課題】複数の構成員同士の間の「好き」又は「嫌い」などの関係を把握する関係検知システムを提供する。
【解決手段】関係検知システム10は構成員を近付かせる接近装置としてのコミュニケーションロボット12を含む。組織内の複数の構成員A,B,C…にはたとえば無線タグ14および赤外線LEDタグ16がそれぞれ装着される。構成員がロボット12とコミュニケーションを図るために近付いて所定領域内に入ると、ロボット12に設けられた無線タグ読取装置および赤外線カメラ44によって各識別情報がそれぞれ取得され、そのような所定領域における行動の履歴が記録される。この行動の履歴はたとえば好意を持つ者同士は同時に滞在するなど構成員間の関係が反映されている。この行動履歴に基づいて構成員の他者との共存の仕方から各構成員間の関係が把握される。
(もっと読む)
複数のロボットアームの追従及び鏡映ジョグ
本発明の方法を実行するシステムは、複数の第1軸の周りで関節運動可能なロボットアームを有してエンドエフェクタを支持するリーダを備える。フォロワは、複数の第2軸のそれぞれの周りで関節運動可能なロボットアームを有する。複数のサーボモータは、リーダアームを第1軸群の周りで関節運動させるとともに、フォロワアームを第2軸群の周りで関節運動させる。ユーザインタフェースは、リーダのアームをジョグ運動させること、及びエンドエフェクタを所定位置に到達させるべく自動実行されるアームの運動をプログラムすることを、ユーザが遂行できるようにする。複数のサーボモータ及びユーザインタフェースに作用可能に接続されたコントローラは、それらサーボモータの動作を制御し、プログラムされた運動に従ってリーダのアームを動かし、リーダの運動に追従又は鏡映するようにフォロワのアームを動かす。  (もっと読む)
(もっと読む)
システム、コンピュータプログラム、データ信号、及びGUIを含むマシンの制御方法
本発明は、アイテムを第1ポジションからピックアップして第2ポジションにプレースする、ロボット10、11、12又はピックアンドプレースマシンのような複数のマシンから成るグループを制御する方法を開示する。センサ7からの第1ポジション3に関する情報は制御手段40に提供され、この制御手段は、メッセージをマスタープロセスから全てのマシンに送信する。メッセージは全ての第1ポジションのリストを含む。これらのマシンは、これらの第1ポジションの各々を動的且つ適応的にハンドリングし、各第1ポジションがハンドリングされるときマスタープロセスに通知を行なう。今度はマスタープロセスが全てのマシンに、所与の第1ポジションがハンドリングされたことを通知する。システム、コンピュータプログラム、及びグラフィカルユーザインターフェースも開示される。  (もっと読む)
(もっと読む)
産業用ロボット

【課題】ロボットに対して簡単に指令を与えることができ、必要な処理のみを自動的に安全で確実に実行するようにする。
【解決手段】ロボット機構部1を制御するロボット制御装置2には、常時ロボットの状態を検出しロボット状態データ22bとして記憶している。ヘッドセット4から音声で入力された作業命令は、音声/文字データ変換装置3で文字データに変換され制御装置2に入力される。制御装置2は、管理データ23bに記憶する作業命令から入力された作業命令と一致するものを探す。一致した作業命令に対してリンクして記憶する実行プログラムグループを特定する。各実行プログラムは、実行順序とその実行プログラム及び判断部を備え、実行順序順に, ロボット状態データに基づいて実行プログラムを実行できるか否か判断部で判断し、実行できるプログラムのみ実行して指令された作業命令を遂行する。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
パソコン・バイオ・ナノ・IT機器装脱着施術設置など々、の生活ナレッジナノクローンシステム携帯電話機ロボット(以下ロボットと記す)
【課 題】 人間は、神様の創造物であるとするならば、ロボットは、人間の創造物であり、パートナーとすることで、人間に役だつ機能を具備構成し、日常生活に手助け有効な生活ナレッジナノクローンシステム携帯電話機ロボツトが、人間を上廻る知能を、なしえない事もやってくれるロボットを提供する。
【解決手段】 携帯電話機本体がロボット(検索ロボット呼称など)の役目をする。有線、無線基地局、インターネットプロトコル電話局などと通信して、情報交換、制御データベース変換、履歴ファイル処理、データに基づいた画・映像表示、言語翻訳音声認識、記憶、プログラム入出力指示、発着信指示、駆動指示、電波電源タイムスイッチ切り替え指示入出力部、通信、データモード、識別コード、GPS位置情報等々有し構成する。通信網を介して、ITバイオインフォマティクスロボット、センサーで安全に飛行するロボットを、車の代用とする。又多種多様のロボットを提供できる。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
サイバー漫才用ロボットおよび支援装置
【構成】 舞台12上に漫才師14とロボット10とがマイク16を挟んで登場する。ロボット10は、胴体20の上に首24で取付けられた頭部26にディスプレイ28を有し、そのディスプレイ28には、サイバー漫才支援装置を遠隔地で利用している漫才コンビの相方の顔画像が表示される。スピーカ22からは、その相方の発した声が出力される。頭部26は、変位可能に設けられ、その頭部に取付けられたカメラ32が人間や客席18を撮影してその支援装置に送る。ロボット10ははさらに移動機構34を有し、支援装置から送られる相方の歩行速度および方向に応じて、ロボット10が移動される。
【効果】 漫才コンビの相方が遠隔地にいても、ロボットを代用して舞台上で漫才を演じることができる。
(もっと読む)
ロボット遠隔制御システムおよびロボット画像遠隔制御処理システム
【課題】 遠隔制御されるロボット装置が少なくとも日本のいずれに配置されても遠隔制御可能なロボット遠隔制御システムを提供することを目的とする。
【解決手段】 ロボットを遠隔制御する遠隔制御装置1と遠隔制御装置からのデータに基づいて制御されるロボット装置2とを有するロボット遠隔制御システムであって、遠隔制御装置は、ロボット装置の制御データを発生する第1のコンピュータ装置と、制御データを公衆回線網に接続された基地局へ送信する第1の移動体通信装置とを有し、ロボット装置は、公衆回線網に接続された基地局から送信されてくる制御データを受信する第2の移動体通信装置と、制御データを処理してロボット機構を制御する第2のコンピュータ装置とを有する。
(もっと読む)
951 - 960 / 964
[ Back to top ]