
国際特許分類[B25J13/06]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176) | 制御台,例.コンソール,スウィッチ板 (73)
国際特許分類[B25J13/06]に分類される特許
21 - 30 / 73
ロボットコントローラのフィルタ
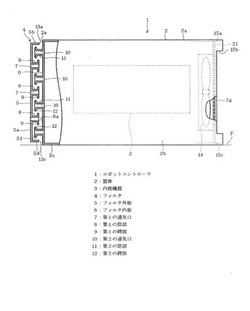
【課題】設置形態がどの向きに変更されてもロボットコントローラの内部にオイルが流入することがないようにする。
【解決手段】フィルタ4のフィルタ外板5には、複数の第1の通気孔7、第1の筒部8、第1の鍔部9が形成され、フィルタ内板6には、第1の通気孔7に対して、フィルタ外板5とフィルタ内板6との対向方向で重ならない位置に、複数の第2の通気孔10、第2の筒部11、第2の鍔部12が形成されている。さらに、第1の筒部8の長さと第2の筒部11の長さとを足した長さは、前記フィルタ外板5とフィルタ内板6との対向距離よりも長く、第1の鍔部9と第2の鍔部12とは、フィルタ外板5とフィルタ内板6との対向方向から見て重ならない形態に形成されている。
(もっと読む)
産業用機械

【課題】簡単な構成で確実にねじの締結による筐体の閉塞状態を確保し、蓋を開けた状態では安全性を確保できる構成とする。
【解決手段】ロボットのコントローラ3は、筐体本体を閉塞する蓋を4個の取り付け用ねじ14a〜14dでとりつける。筐体本体の開口面の対角位置の取り付け用ねじ14a、14cに対応して筐体内部にレバー型スイッチ15が設けられる。蓋を取り付け用ねじ14a、14cにより固定するとレバー型スイッチ15がオン状態に移行する。高電圧が印加されるモータ駆動回路26a、26bへの給電経路には、リレースイッチ回路23が設けられる。給電許可回路24は、リレーコイル23c、レバー型スイッチ15、15を介してグランドに接続され、取り付け用ねじ14aおよび14cの締め付け状態でリレースイッチ回路23がオン状態となり、安全性の確保を図れる。
(もっと読む)
産業機器のコントローラ
【課題】吸気口を通じて筐体内部に吸入される空気を通過させるフィルタの汚れ具合を精度よく判断することができる産業機器のコントローラを提供する。
【解決手段】吸気口18を複数の開口18aにより細分化された構成とし、吸気口18を通じて吸入される空気の流速を高め得るようにする。フィルタ26は、取付枠24、25に取り付けられた状態において、筐体11の前後方向に移動可能とする。取付枠24、25にフィルタ26が取り付けられた状態で、互いに対向するような位置に筐体側電極23およびフィルタ側電極27を設ける。
(もっと読む)
ロボット用コントローラ
【課題】構成部品の共通化を図りコントローラの製造コストを下げることを目的とする。
【解決手段】ロボット用コントローラ10であって、回路基板60を備えたコントローラ本体12と、嵌合面をコントローラ本体12の外側に向けた状態で、コントローラ本体12に取り付けられた第1コネクタ72Eと、第1コネクタ72Eを通じて電力の供給を受けロボット用コントローラ10の駆動状態を表示する表示部材90又は第1コネクタ72Eを開閉可能とする開閉部材80のいずれか一方の部材と、前面部40に形成され、表示部材90又は開閉部材80のいずれか一方を択一的に係合させる係合部48とを備えたことを特徴とするロボット用コントローラ。
(もっと読む)
ロボットコントローラ
【課題】フレームの外面にコネクタを備えるものにあって、フレームの向きを変えずに、コネクタの向きを複数方向に変更することを可能とする。
【解決手段】ロボットコントローラのフレーム2の一つの頂点部分に、三面に跨る開口部10を形成し、この開口部10部分に可変コネクタ6を回動操作可能に設ける。可変コネクタ6を、球状ハウジング11とその外面の一部から偏心状に突出する嵌合部12とを一体的に設けて構成する。球状ハウジング11の外面部に、球の中心点に関して点対称に配置されてペアを構成する複数対の係合凹部を設ける。フレーム2の前面の開口部10の上辺部分に、1個の係合凹部に着脱可能に係合する保持部16を設け、フレーム2内の球状ハウジング11の後部に位置して、それとはペアの係合凹部に係合する係合凸部17aを有する板ばね製の保持部材17を設ける。
(もっと読む)
ロボット制御装置
【課題】本発明は、省スペース化するとともに、装置内部の放熱の問題を解決できるロボット制御装置を提供する。
【解決手段】複数台ロボットを1台のコントローラで制御するロボット制御装置であって、複数台のロボット駆動装置部21〜26の上部に共通制御回路27を備えたものである。
(もっと読む)
ロボットシステム
【課題】本発明では、1台のロボット教示装置で複数個の制御グループを操作する場合でも安全に操作対象を動作できるロボット教示装置を提供する。
【解決手段】複数の関節を持つロボットと、複数台の前記ロボット接続し、これらを制御するロボット制御装置1と、前記ロボット制御装置1に接続され、前記ロボットの教示や操作を行うロボット教示装置6から構成されるロボットシステムにおいて、前記ロボット教示装置6上のディスプレイ7の表示状態の変動によって操作の対象となるロボットを自動的に選択するものである。
(もっと読む)
ロボットコントローラ
【課題】発生頻度が異なる複数のログデータについて個々の発生パターンを表示する。
【解決手段】ロボットコントローラ3は、発生頻度が異なるワーニングデータを発生順に記憶するワーニングデータ記憶領域7aとエラーデータを発生順に記憶するエラーデータ記憶領域7bとを別々に用意し、ログデータの表示要求が発生すると、それらワーニングデータ記憶領域7aに発生順に記憶されているワーニングデータとエラーデータ記憶領域7bに発生順に記憶されているエラーデータとを時系列に並替えて表示する。発生頻度の差に拘らず発生頻度が高いワーニングデータだけでなく発生頻度が低いエラーデータをも表示することができる。
(もっと読む)
ロボット操作装置及びロボット操作システム
【課題】移動経路に自由度を持たせながらも、ユーザによる移動位置の指定操作が煩雑になるのを防止することが可能なロボット操作装置等を提供する。
【解決手段】ロボットに動作指示を与え、ロボットを動作させるためのロボット操作装置であって、ユーザが操作をする操作入力部102と、操作入力部102の操作によってユーザから入力された動作指示の履歴を蓄積するベースポイントデータベース105と、ベースポイントデータべース105に蓄積された動作指示の履歴に基づいてロボットが次に動作する動作候補を複数生成する動作候補生成部108bと、動作候補生成部108bで生成された複数の動作候補をユーザにより選択可能に提示する情報提示部103とを備えたものである。
(もっと読む)
産業用ロボットコントローラ
【課題】産業用ロボットコントローラの小型化を実現するとともに表示灯の視認性、コネクタの脱着性を向上し、狭いスペースにも設置することができる産業用ロボットコントローラを提供すること
【解決手段】産業用ロボットコントローラ1のフロントパネル2を、天板から傾斜して前方に突出するように形成された第1フロントパネル2aと、底面から傾斜して前方に突出するように形成された第2フロントパネル2bと、の2面で構成した。
(もっと読む)
21 - 30 / 73
[ Back to top ]