
国際特許分類[B25J13/06]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176) | 制御台,例.コンソール,スウィッチ板 (73)
国際特許分類[B25J13/06]に分類される特許
31 - 40 / 73
産業用ロボットコントローラ

【課題】産業用ロボットコントローラの小型化を実現するとともに表示灯の視認性、コネクタの脱着性を向上し、狭いスペースにも設置することができる産業用ロボットコントローラを提供すること
【解決手段】産業用ロボットコントローラ1のフロントパネル2を、天板から傾斜して前方に突出するように形成された第1フロントパネル2aと、底面から傾斜して前方に突出するように形成された第2フロントパネル2bと、の2面で構成した。
(もっと読む)
塗装装置およびそれに関する方法

本発明は構成部品2を塗装するための塗装装置1であって、特に車両本体またはその部分を塗装するための、アトマイザーの位置を定める多軸塗装ロボット6、7と、塗装ロボット6、7を制御するためのロボット制御装置と、そしてロボット制御装置を備えた制御キャビネット8、9とからなるものに関する。本発明は、制御キャビネット8、9を、機械的に塗装ロボット6、7を支える荷重支持形の支柱の形とすることを提案する。本発明は、さらに関連する方法に関する。 (もっと読む)
成形品取出機
【課題】 ティーチング等の手動操作が行いやすいコントローラを備え、しかも、成形品取出機本体の制御部を複雑化しなくてすむ成形品取出機を提供する。
【解決手段】 成形品取出機1は、成形品取出機本体3と主コントローラ5と副コントローラ7を備えている。副コントローラ7は、主コントローラ5の下位に存在しており、副コントローラ7からの設定は主コントローラ5を経由して伝達される。作業者は、使用用途に応じて主コントローラ5又は副コントローラのいずれを操作するかを決定することができる。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。 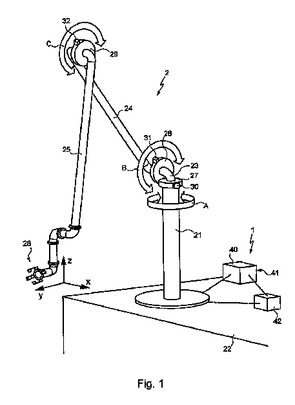 (もっと読む)
(もっと読む)
ロボットコントローラ
【課題】ロボットコントローラ及びその筐体表面からの放熱を排熱し、コントローラ搭載スペースにおける温度上昇を防ぐことができるようにする。
【解決手段】コントローラ筐体1の全体を収納するシャーシ2を備え、一端がコントローラ筐体1内部に連通し、他端がシャーシの外部空間に連通した第1のダクト11と、一端がコントローラ筐体1内部に連通し、他端がシャーシ2の外部空間に連通し、内部に排気用ファン31を有する第2のダクト21と、一端がコントローラ筐体1とシャーシ2とで囲まれた空間に連通し、他端が外部空間に連通した第3のダクト12と、一端がコントローラ筐体1とシャーシ2とで囲まれた空間に連通し、他端が外部空間に連通し、内部に排気用ファン32を有する第4のダクトで構成した。
(もっと読む)
ロボットコントローラ
【課題】コネクタの周辺に付着した油が基板の電子部品取付面上を伝い落ちて電子部品に付着することを防止できると共に、設置方法を変更した場合であっても油が電子部品に付着してしまうことを極力抑制可能なロボットコントローラを提供する。
【解決手段】空気中に油ミストが浮遊するような特殊な環境において床面に降り注ぐ油ミストや粉塵対策に基板を立設する方向でコネクタ5を床面から離すように設置された場合は、コネクタ5の周辺に付着した油がプリント配線基板6の電子部品取付面6a上を伝い落ちるものの、電子部品7の上方を覆う油カバー8により油が電子部品7に付着することを低減できる。また、コントローラボックス2の内面に垂れ落ちた油は薄く広がって張付いているので、ロボットコントローラの設置方法が変更になった場合であっても、油が内面から垂れ落ちて電子部品7に付着することを極力抑制することができる。
(もっと読む)
操作装置およびソフトキーボタンへの操作画像の割り当てのための方法
【課題】工作機械、生産機械、クレーンおよび/またはロボットを操作するための操作装置におけるソフトキーボタンへの操作画像の簡単な割り付けを可能にする。
【解決手段】操作装置1が画像スクリーン2、ソフトキーボタン3a,3b,3c,3dおよび操作ボタン4を有し、操作画像の呼出し時に呼び出された操作画像が可視化されるように操作装置1が構成されていて、操作ボタン4を押すことによって使用者メニューが可視化されかつ長い時間にわたって1つのソフトキーボタンが押されることによってこのようなやり方で押されたソフトキーボタンが呼び出された操作画像に割り当てられるように操作装置1が構成されている。
(もっと読む)
産業用ロボットの制御装置
【課題】ロボット本体1の各関節軸を動作させるモータ2を駆動制御するサーボアンプ5を有する産業用ロボットの制御装置4において、サーボアンプ5自体で自動的に故障診断を正確かつ確実に行うことが可能な産業用ロボットの制御装置を提供する。
【解決手段】サーボアンプ5は、モータ2を駆動する制御信号を出力するパワー回路部7と、パワー回路部7から出力された制御信号に基づいてサーボアンプ5の故障の有無を診断する故障診断回路部10と、モータ2の電流値および位置情報に基づいて異常を検出する異常検出回路部8と、異常検出回路部8において異常を検出していない場合にはパワー回路部7から出力された制御信号をモータ2へ入力させるように選択するとともに、異常検出回路部8において異常を検出した場合にはパワー回路部7から出力された制御信号を故障診断回路部10へ入力させるように選択するマルチプレクサ9と、を有するようにした。
(もっと読む)
工作機械、生産機械および/またはロボットの操作のための操作装置
【課題】簡単に構成可能な操作装置を可能にする。
【解決手段】本発明は、操作装置(1)がディスプレイ(4)および透明板(2)を有し、ディスプレイ(4)が透明板(2)の背後に配置されていて、透明板(2)がディスプレイ(4)の外側に張り出した縁範囲(3)を有し、操作装置(1)が表示装置を有し、表示装置によって表示信号(5a,5b)が縁範囲(3)を通して送出可能である工作機械、生産機械および/またはロボットの操作のための操作装置に関する。
(もっと読む)
ロボット応用・形成データを記憶する交換自在なメモリ装置
【課題】ロボットドライブを交換・修理する際、再度学習させることを不要とし、保守性を向上すること。
【解決手段】ロボットドライブ14の操作及び設定パラメータが、該ドライブ装置若しくはその近傍に設置され、着脱可能な記憶装置に記憶され、学習ステーションを含むアームデザインやシステムレイアウトに関連するデータがロボットドライブに関連して保持され、記憶装置の再度のプログラムが不要となるため、ドライブシステムのインストールや交換という導入作業時間が最小で済む。マスターキーの形態をとる着脱可能な記憶装置は、ダラスキー(DallasKey)、イープロム(Eprom)等で具体化され、ロボット本体若しくはその近傍に固定される。従ってロボットドライブを交換する際にもとのキーを新しいロボット若しくはその近傍に固定すると、ロボットドライブは当初のロボットドライブの保有パラメータを全て承継する。
(もっと読む)
31 - 40 / 73
[ Back to top ]