
国際特許分類[B25J13/06]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176) | 制御台,例.コンソール,スウィッチ板 (73)
国際特許分類[B25J13/06]に分類される特許
41 - 50 / 73
工作機械、生産機械、又はロボットとして形成された機械の操作装置

【課題】工作機械、生産機械、又はロボットとして形成された機械の簡単な操作を可能にする。
【解決手段】機械を操作するための操作装置1がディスプレイ2を有し、ディスプレイ2によって同時に第1の操作ウィンドウ3a及び第2の操作ウィンドウ3bが可視化可能であり、機械の操作のための第1のアプリケーション4aが第1の操作ウィンドウ3aに可視化可能であり、機械を操作するための第2のアプリケーション4bが第2の操作ウィンドウ3bに可視化可能であり、第1のアプリケーション4aの操作は第1の操作ウィンドウ3aに所属する第1の操作キー5aを用いて行われ、第2のアプリケーション4bの操作は第2の操作ウィンドウ3bに所属する第2の操作キー5bを用いて行われ、第1の操作キー5aは第1の操作ウィンドウ3aの単一の又は複数の側方に沿って配置され、第2の操作キー5bは第2の操作ウィンドウ3bの単一の又は複数の側方に沿って配置されている。
(もっと読む)
増設駆動軸付ロボット制御装置安全機構

【課題】ロボット制御装置を用い、増設駆動軸付ロボット制御装置を構築する場合、天板を変更せずに、増設部分の天板を追加しながら、あわせて感電を防止できる安全機構を提供する。
【解決手段】増設駆動軸付ロボット制御装置筐体に、増設部上蓋となる第2部材を下にしてロボット制御部上蓋となる第1部材をネジで共締めする。そのことで増設部上蓋となる第2部材を電源投入のまま取り外すことができない安全機構を実現する。そのことで、新たにサイズの異なる増設駆動軸付ロボット制御装置用に上蓋を作らずに済むため、部品共有化による製造コストを低減できる。また、増設部上蓋となる第2部材にストッパを設けることで、電源投入のままネジを外すことで発生する摺動による上蓋除去をも防止できる。
(もっと読む)
ロボット制御装置
【課題】駆動軸が増設できるロボット制御装置で、増設部の駆動軸制御部分の温度異常も合わせて検出しながら、温度判定手段を増やさずに済むコストを低減できるシステムを提供する。
【解決手段】ロボット制御装置に元々備えられたロボット制御部の温度検出手段12に増設した駆動軸の温度検出手段13を並列に接続しその両端の信号を温度異常判定手段14に入力し判定することで、異常判定手段を増やすことなく制御装置内の温度異常を検出できる。そのため、システムを大きく変更することなく、製造コストを低減することができる。
(もっと読む)
遠隔操作支援装置および遠隔操作支援プログラム
【課題】対象物の位置や姿勢が事前に判らない場合においても、任意の方向から対象物を確認することを可能としつつ、対象物の遠隔操作を支援できるようにする。
【解決手段】環境データ取得手段21aは、レーザスキャナ14にて計測された対象物11上の点群データを環境データ15として取得し、対象物モデル表現手段21bは、対象物11についての環境データ15に基づいて三次元認識処理17を行うことにより、対象物11の形状および姿勢が反映された対象物モデル表現18を生成し、マニピュレータモデル表現手段21cは、マニピュレータ12の各軸の状態19に基づいてマニピュレータ12の動作状態が反映されたマニピュレータモデル表現20を生成し、三次元画像生成手段21dは、三次元空間の指定された視点から見た対象物モデル表現18およびマニピュレータモデル表現20を同一画面上に三次元的に表示させる。
(もっと読む)
ロボット、及びその電源制御方法
【課題】漏電による感電を効果的に防ぐことができるロボット、及びその電源制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボット100は、バッテリ141と、複数の負荷146と、負荷146に供給される電源を遮断する負荷側漏電遮断器145と、複数の負荷146に供給される電源を遮断する電源側漏電遮断器143と、負荷146に流れる出力電流と、負荷146から負荷側漏電遮断器145側に戻る戻り電流とを検出する電流検出部151と、出力電流から電流検出部との差分値が設定値Bを越えているかを判定する判定部152と、差分値が設定値Bを越えている時間が設定時間Δtより短い場合に負荷側漏電遮断器145によって電源を遮断し、設定時間Δtより長い場合に電源側漏電遮断器143によって電源を遮断するバッテリ制御部とを備えるものである。
(もっと読む)
多重バイナリ入力を使用したロボットプログラミング制御
【課題】多重バイナリ入力を使用したロボットプログラミング制御を提供する。
【解決手段】ロボット制御をプログラムする方法は、制御ループで実行可能な動作を定める段階と、実行可能な動作に対する修正又は追加を行うサブプログラムを確立する段階とを含む。サブプログラムは、外部バイナリ入力により実行される。外部バイナリ入力は、制御ループの実行の間に提供されて、制御ループの部分としてサブプログラムを実行することができるようにする。
(もっと読む)
複数のロボット制御装置用電源装置からなる電源システム
【課題】ロボット制御装置用電源装置の台数によらずリモートコントロール信号のドライブ能力は1台分でよく、さらに上位コントローラを使用しなくても同期制御することができる複数のロボット制御装置用電源装置からなる電源システムを提供する。
【解決手段】ロボット制御装置用電源装置4は、次段のロボット制御装置用電源装置4に対してリモートコントロール出力信号を出力するリモートコントロール信号出力部3と、+24V系の第1のリモートコントロール信号入力部2と、+5V系の第2のリモートコントロール信号入力部15を備え、第1のリモートコントロール信号入力部2のリモートコントロール信号と第2のリモートコントロール信号入力部15の電源コントロール信号の2系統のコントロール信号に基づいて直流電源8をオン/オフ制御する。
(もっと読む)
ロボット制御装置
【課題】産業用ロボットのモータを駆動するサーボアンプをロボット制御装置内に収納したロボット制御装置において、サーボアンプを故障、定期的点検等で交換する時に、サーボアンプ配線及びロボット制御ケーブルと接続コネクタの取り外し、接続し直し、及びサーボアンプの交換を短時間で行うことができるロボット制御装置を提供。
【解決手段】サーボアンプ 2にサーボアンプ配線と接続されたサーボアンプ側コネクタ 4をサーボアンプ 2に突出して設け、ロボット制御ケーブル 3及びロボット制御ケーブル 3と接続されたケーブル側コネクタ 7をボット制御装置 1に固定し、サーボアンプ 2を交換するとき、交換するサーボアンプ 2のサーボアンプ側コネクタ 4をロボット制御装置 1のケーブル側コネクタ 7に嵌合し/切り離すことにより、サーボアンプ交換作業時にロボット制御ケーブル 3とサーボアンプ配線とを個々に接続し・切り離す必要をなくした。
(もっと読む)
作動装置
【課題】操作者による手動操作や音声操作を用いることなく指令情報を入力することができ、操作者の意図する通りに作動させることができる作動装置を提供する。
【解決手段】ロボット10は、ロボット10の前方の床面の所定の位置において物体を検出するレンジセンサ17と、同床面上にロボット10が実行する作動の内容を表した作動メニューMを表示するプロジェクタ20と、これらレンジセンサ17およびプロジェクタ20の各作動を制御するとともに所定の作動内容を実行するコントローラ30とを備えている。レンジセンサ17は、作動メニューMの前面を含むようにレーザ光を走査して測長信号をコントローラ30に出力する。コントローラ30は、測長信号が表す作動メニューM上における物体の位置を用いて、同位置に対応する作動内容を実行する。
(もっと読む)
移動するワークピースを加工するための加工システム
加工システム(10)が、産業用ロボット(16)によって、移動するワークピース(12)の加工を行い、産業用ロボット(16)を、ワークピース(12)及び/又は移動可能なワーク担持ユニット(14)に一時的に固定結合させることができ、産業用ロボット(16)は、非結合動作位置(42)で、能動的に作用する駆動ユニット(20)によってワークピースとは無関係に移動させることができる担持デバイス(18)によって担持され、結合動作位置(44)で、浮動軸受システム(22)によって、担持デバイス(18)に対して浮動に取り付けられ、さらに、産業用ロボット(16)の制御ユニット(36)及び/又は少なくとも1つの製造ユニット(40)が、担持デバイス(18)上に配置されることを特徴とする。 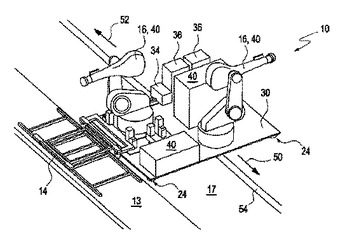 (もっと読む)
(もっと読む)
41 - 50 / 73
[ Back to top ]