
国際特許分類[B25J15/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686) | ヘッドまたはヘッド部品を遠隔分離または遠隔交換するための装置をもつもの (109)
国際特許分類[B25J15/04]に分類される特許
81 - 90 / 109
ハンドリングロボット

【課題】同一のハンド装置の爪で、ワークを掴むことができ、かつエアブロー又は洗浄液での洗浄などの流体噴出ユニットを掴むこともできるハンドリングロボットを提供。
【解決手段】ハンド装置 2は、爪 3でワーク 4を掴むことができ、かつハンド装置 2の爪 3は、流体噴出ユニット 8の本体15を内側で掴む内側補合形状25及び内側に開口する内側貫通穴14を有し、流体噴出ユニット 8の本体15は吸着パッド17と、吸着パッド17に本体内の配管16で配管接続されハンド装置 2の爪 3の内側に開口する内側貫通穴14と嵌まり合うよう吸着パッド17の外側に開口する外側開口26、を有し、ハンド装置 2の爪 3は、ワーク 4を掴む作業を行った後、流体噴出ユニット 8をハンド装置 2の爪 3の内側で掴み、流体噴出ユニット 8のノズル20から圧縮流体24を噴出する作業を行うようにした。
(もっと読む)
部品移載装置及び表面実装機

【課題】移載精度を高めた表面実装機を提供する。
【解決手段】本発明の部品移載装置である表面実装機10は吸着ノズル70の嵌合軸部71とノズルホルダ80の嵌合孔81とが嵌合可能に設けられ、嵌合軸部71に設けた受け溝75の上側となる受け面76と、ノズルホルダ80に設けた切欠部86の下側となるストッパ面88と、受け面76及びストッパ面88に当接するホルダーピン100と、ホルダーピン100をノズルホルダ80の外側から内側方向に向けて押圧してホルダーピン100を受け面76及びストッパ面88に押し当てることにより嵌合軸部71の突当面77が規制部83Aに当接する方向に付勢する保持バネ110とを備えている。これにより、吸着ノズル70の固定位置精度を高めガタ付きを無くすことで、移載精度を高めることができる。
(もっと読む)
自動工具交換装置の落下防止システム
【課題】システムの応答速度の低下による、不動作時間がほとんど発生しない自動工具交換装置の落下防止システムを提供すること。
【手段】第1ユニット1に具備させたシリンダー10の切離ポート10a又は接続ポート10bへの空気の供給により第1ユニット側の係止具11を移動せしめ、第1ユニット1に対して第2ユニット2を切離・接続することにより他の第2ユニットに交換する形式の自動工具交換装置において、外部電力3よりソレノイドバルブ6の切換えを行う態様で、切離ポート10a又は接続ポート10bへの空気の供給が可能となるようにしてある
(もっと読む)
支持体へのツールの迅速な組み立てのための装置
ツールの支持体へのツールの迅速な組み立てのための装置であって、上記支持体に取り付けられて貫通孔部(10)を有するボア(14)内に配置されたボルト(15)と、マンドレル(12)と、を備え、マンドレル(12)は、ツールに取り付けられて上記貫通孔部(10)内に配置され、上記ボルトと接触する。ツールとその支持体との間の結合部において、装置は、ホゾ部(11)及びホゾ穴部(13)の組からなるセンタリング及びロック手段を備え、組は、マンドレル(12)に垂直に延在してこれにより組立体のT字状の構造体を形成し、構造体は、ツールに高い剛性を付与する。上記組立装置は、特にアクチュエータまたはプライヤ、すなわちフラスコ、ボトルまたは同様のものの梱包のための機会に使用されるツールのようなツールに適している。 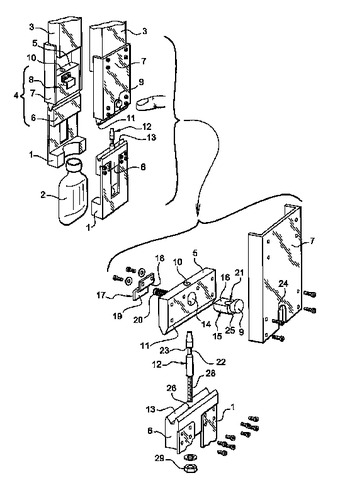 (もっと読む)
(もっと読む)
サーボマニピュレータの着脱装置
【課題】伸縮自在なサーボマニピュレータの着脱装置に関する。
【解決手段】作業者が操作するマスターサーボマニピュレータと、前記マスターサーボマニピュレータの信号が伝達されて作業環境にて前記マスターサーボマニピュレータの動きを模写するスレーブサーボマニピュレータと、前記マスターまたは/およびスレーブサーボマニピュレータに備えられ、前記サーボマニピュレータを伸縮自在な伸縮装置から分離または結合する着脱装置と、を含み、前記着脱装置は、円錐状の結合突起が結合穴に結合した後、前記結合突起が離脱しないように結合穴が形成された回転板が回転して前記結合突起が係止するように形成されたことを特徴とする。
(もっと読む)
交換可能な工具
【課題】特別な方法で工具を保持し、マニピュレータに対して工具が回転することを阻止する。
【解決手段】保持機構に工具1を保持するための保持端2を備えた工具本体8を有する交換可能な工具1であって、工具1を保持機構の内外に操作するマニピュレータ7に実質的に回転不能に連結するために、工具本体8内に連結手段を配設した工具1を提供する。また、工具1を保持機構の内外に操作するためのマニピュレータ7を備えた工具1との組合せを提供する。さらに、そのような工具1を保持機構の内外に操作するための方法を提供する。
(もっと読む)
ロボットツールチェンジャ
互いに連結されるように構成されたマスターユニット及びツールユニットを有するロボットツールチェンジャ。ロボットツールチェンジャのマスターユニットには、ロック位置とロック解除位置との間で移動可能であるピストンが移動可能に搭載される。ピストンは、ロック解除面、フェイルセーフ面及びロック面を有する接触領域を含む。保持領域の内部に含まれる一連の転がり部材が更に設けられ、転がり部材は、マスターユニットをツールユニットにロックするためにピストンにより作動される。例えば、ピストンは転がり部材と係合し、ツールユニットの一部を形成する軌道輪とロックされた関係になるように転がり部材を押圧する。ピストンが不慮の事態により又は偶発的にロック位置からロック解除位置へ動くのを防止するために、通常ピストンのロック面とロック解除面との間に配置され、ピストンがロック位置からロック解除位置まで移動する場合に、ピストンの移動を抑制する抑制面がピストンに設けられる。  (もっと読む)
(もっと読む)
ロボットハンドとロボットハンドのフィンガー交換装置
【課題】予めモジュール化してあるフィンガーユニットを積極的に脱着交換することで多種多様な部品の把持に対応できるようにした汎用性の高いロボットハンドを提供する。
【解決手段】予めモジュール化してある同種または異種の複数のフィンガーユニット3,4を共通のコモンベース2に着脱可能に装着する。フィンガーユニット3は二指把持タイプのものであって、対向配置した二つのフィンガー5または6を一つのモジュールとしてユニット化したものとし、例えば対向配置した二つのフィンガー5がそれぞれに単一または複数の関節10,11を有した関節型のものや、対向配置した二つのフィンガー6が互いに接近離間可能な直動型のものとする。
(もっと読む)
ワーク把持装置
【課題】 近接した状態で不規則に配されている外形形状が異なる多数のワーク群の中から任意のワークを把持して、確実に取り出すことができるワーク把持装置を提供する。
【解決手段】 固定板7に爪保持リンク4と第1腕リンク5、第2腕リンク6(図7示)とを組み合わせた2組の平行リンク機構を設け、前記爪保持リンク4に把持爪2を揺動自在に設ける。エアシリンダ8の動作によるプランジャー9の進退により第2腕リンク6を軸7bを中心として揺動させると、平行リンク機構の原理により把持爪2が進退する。この把持爪2をワークの前後に配することにより、これら前後の把持爪2でワークを把持できる。しかも、把持爪2はワークに対して側方から接近するものではないから、ワークが近接した状態にあっても所望のワークを取り出せる。
(もっと読む)
先端工具案内装置及び先端工具案内装置の搬入方法
【課題】原子力発電設備の蒸気発生器の水室内に搬入されて、ショットピーニングヘッド等の先端工具を、必要領域に沿い案内する。
【解決手段】先端工具案内装置1000は、旋回支持部100と、スライドテーブル200と、マニプレータ300とで構成されている。旋回支持部100は、水室内にて自立・固定されると共に、連結されたスライドテーブル200を旋回する。スライドテーブル200はマニプレータ300を連結すると共に前後方向にスライド移動する。マニプレータ300は、先端にて先端工具を把持する。水室への搬入の際には、旋回支持部100と、スライドテーブル200と、マニプレータ300を切り離して、個別に搬入を行い、水室内にてこれらを組み立てて先端工具案内装置1000が構成される。
(もっと読む)
81 - 90 / 109
[ Back to top ]