
国際特許分類[B25J15/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686) | ヘッドまたはヘッド部品を遠隔分離または遠隔交換するための装置をもつもの (109)
国際特許分類[B25J15/04]に分類される特許
21 - 30 / 109
チャック装置
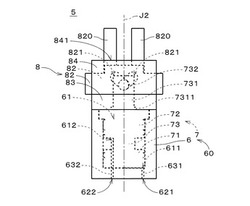
【課題】チャック装置において爪部の可動範囲の変更を容易に行う。
【解決手段】チャック装置5は、進退部材73を進退させる進退駆動部60、および、複数の爪部820を有する把持機構8を有する。把持機構8は、複数の爪部820に接続される複数の板カム部82、および、複数の爪部820の移動をガイドするガイド部を有する。板カム部82にはカム孔821が形成され、進退部材73に設けられたピン732がカム孔821に係合し、進退部材73の移動により、複数の爪部820のそれぞれが進退部材73の移動方向に垂直な方向に移動する。チャック装置5では、複数の板カム部82が、カム孔の形状が異なる他の複数の板カム部に交換可能である。これにより、チャック装置5において爪部の可動範囲の変更を容易に行うことができる。
(もっと読む)
ロボットハンド

【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
ロボットハンド
【課題】ロボットハンドにて簡単な構造で先端部の非装着時に流体流路および伝送経路を遮断する。
【解決手段】ロボットハンドでは、ハンド本体部3と把持部を有するハンド先端部4とが着脱自在である。ハンド本体部3は、第2穴部352、第2穴部352内に設けられる摺動部38および付勢部39、把持部の駆動用の流体が流れる第2流体流路342、並びに、把持部からの信号が伝送される伝送経路37を有する。これらの流路および経路の一部は摺動部38に形成される。ハンド先端部4の非装着時には、摺動部38が付勢部39に付勢されて遮断位置に位置し、これらの流路および経路が遮断され、ハンド先端部4の装着時には、ハンド先端部4により押されて摺動部38が接続位置に位置し、これらの流路および経路が摺動部38を介して接続される。これにより、簡単な構造でハンド先端部4の非装着時に第2流体流路342および伝送経路37が遮断される。
(もっと読む)
自動溶接システムにおける溶接方法および自動溶接システム
【課題】レーザセンサを溶接トーチの近傍に取り付けている為に定期的な保守作業が必要になり、生産性を低下させる。
【解決手段】レーザセンサLSで溶接部位Wsを検出して教示データを補正し、溶接トーチTにより加工する自動溶接システム1である。溶接ロボットMPは溶接トーチ又はレーザセンサのどちらかを取り付けるためのツール着脱機構を有する。溶接トーチを待避させるためのツールスタンド11およびレーザセンサを待避させるためのツールスタンド12を備える。まず、溶接トーチをツールスタンド11に待避させ、レーザセンサを取り付ける。次にレーザセンサを取付けた状態のときに作成した教示データを補正する。次にレーザセンサをツールスタンド12に待避させ、溶接トーチを取付ける。補正後の教示データを再生することにより溶接加工を行う。輻射熱やヒュームからレーザセンサを保護することができる。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
作業ロボット用エンドエフェクタ交換装置およびその一部を具える作業ロボット
【課題】取り扱う製品や部品の形状に合ったピッキング用ハンドや、ネジ締めドライバ、半田ごて等の作業ツールを素早く交換することが可能で、かつ位置決め用スタンド等の専用治具を必要としない作業ロボット用エンドエフェクタ交換装置を提供することにある。
【解決手段】各々識別標識を持つ複数のエンドエフェクタと、前記エンドエフェクタを任意の場所に保持するエンドエフェクタ置場と、前記エンドエフェクタ置場に保持された前記エンドエフェクタの前記識別標識を撮像する撮像手段と、前記撮像手段が撮像した前記エンドエフェクタの前記識別標識の画像に基づき前記エンドエフェクタの3次元位置を算出するエンドエフェクタ位置算出手段と、前記算出したエンドエフェクタの3次元位置を作業ロボットの作動制御装置に教示するエンドエフェクタ位置教示手段と、を具えてなる作業ロボット用エンドエフェクタ交換装置である。
(もっと読む)
把持装置、ロボットシステム及び把持方法
【課題】把持対象物を把持する際に把持対象物を高精度に位置決めすること。
【解決手段】多指ハンド3は、掌部12と関節17,18を有する複数の指部13とを備え、掌部12及び複数の指部13で工具7を把持する。掌部12は、工具7の把持対象物側接触面25に接触させる掌部側接触面12aを有している。掌部側接触面12aには、把持対象物側接触面25に設けられた突起部26,27が挿入される穴部19,20が設けられている。そして、穴部19,20に突起部26,27が挿入されることにより、掌部側接触面12aの接線方向Tに対する工具7の位置決め及び掌部側接触面12aの法線nを回転軸心とした回転方向Rに対する工具7の位置決めがなされる。
(もっと読む)
ロボットハンドのツール着脱機構
【課題】ツールの交換時間が短く、かつ視覚センサなどのツールを取り付けた場合でもロボットのハンド部全体を軽量化・コンパクト化することができるロボットハンドのツール着脱機構を提供する。
【解決手段】1対の爪部材11,12が平行に開閉するロボットハンド10でツール20を着脱するロボットハンドのツール着脱機構。ツール20がツールベース22を有し、ツールベース22は、爪部材11,12の開動作又は閉動作により爪部材の一部と係合してその位置を位置決めする3以上の位置決め装置24を備える。
(もっと読む)
ワーク搬送装置におけるハンド着脱機構
【課題】ハンドの着脱が簡単で、耐久性に優れたワーク搬送装置におけるハンド着脱機構を提供する。
【解決手段】ロボット先端部に、ハンド装脱着用の前後スライド溝21を設けたホルダイケール20を固定し、ホルダイケール20に内蔵した流体圧シリンダの駆動で、摺動ピストンが前後スライド溝21に挿入したハンドユニット40の基端部を押圧固定するワーク搬送装置におけるハンド着脱機構であって、先端係合用のV字ブロック24と、摺動ピストンに一体化したロックピン28とを前後スライド溝21内に前後に離間して設け、ハンド基端部の挿入端側にスリット44を設けて二股状端部43を構成し、二股の付け根側上面にロックピン28の先端のすり鉢状ブロック29と係合するテーパ状係合部45を設けた。
(もっと読む)
21 - 30 / 109
[ Back to top ]