
国際特許分類[B25J15/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 把持部 (1,686) | ヘッドまたはヘッド部品を遠隔分離または遠隔交換するための装置をもつもの (109)
国際特許分類[B25J15/04]に分類される特許
11 - 20 / 109
継手
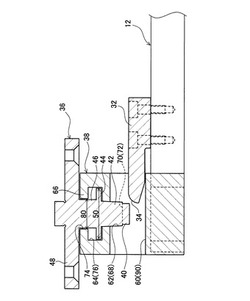
【課題】連結のために特別な動力手段を設けることなく、接続した工具などの部品の落下を防止することができる継手を提供すること。
【解決手段】本発明の一態様は、ロボット10に工具を接続するアダプタ14において、テーパシャンク部42と突出部44とを備えるオスアダプタ36と、テーパ孔部62と拡径部64と端面部66とを備えるメスアダプタ38と、を有し、突出部44が拡径部64の内部に配置され、かつ、テーパシャンク部42の径方向について突出部44が端面部66と重なり合っている場合に、オスアダプタ36をメスアダプタ38に向かって移動させることにより、テーパシャンク部42とテーパ孔部62とが嵌まり合ったクランプ状態が設定されること、を特徴とする。
(もっと読む)
部品交換装置、部品交換方法

【課題】工具などの部品の交換のために特別な動力手段を設けることなく、当該部品を短時間で交換できる部品交換装置、部品交換方法を提供すること。
【解決手段】本発明の一態様は、工具交換装置22において、テーパシャンク部42を備えるオスアダプタ36と、テーパ孔部62とピン挿入孔部60とを備えるメスアダプタ38と、抜きピン32を備えるマガジン12と、を有し、テーパシャンク部42とテーパ孔部62とが嵌まり合ってクランプ状態を設定し、ピン挿入孔部60の内部に挿入した抜きピン32にてオスアダプタ36をメスアダプタ38から離れる方向に押し出すことによりクランプ状態を解除すること、を特徴とする。
(もっと読む)
双腕ロボット
【課題】本発明は、ロボットハンドの交換時間を短縮するとともに、専用の動力源を引くことなしに、また、ハンドの誤着を検出することができる双腕ロボットを提供する。
【解決手段】着脱可能なハンドを備えたロボットであり、先端に多指ハンドが取り付けられた多自由度の第1のアームと、前記着脱可能なハンドを先端に取り付け可能な多自由度の第2のアームとを備えた双腕ロボットにおいて、前記着脱可能なハンドは、当該ハンドおよび前記第2のアームの連結を解除するボタンを備え、前記多指ハンドは、3つの指を有しており、2つの指で前記着脱可能なハンドを把持するとともに、残りの1つの指で前記ボタンを操作することによって前記着脱可能なハンドを交換することを特徴とする双腕ロボットとするものである。
(もっと読む)
マニピュレータ
【課題】 従来のロボットアームとエンドエフェクタの電気接続接点には、加圧用のスプリングやテコのような機構が必要であったためエンドエフェクタが大きくなり、小型の部品を組み付けるための小型マニピュレータには不向きであった。
【解決手段】 上述の課題を解決するための本発明は、第一の電気接点部(222)を備えた付き当て面(121)を有するロボットアーム(201)と、第二の電気接点部(122)を備えた付き当て面(221)を有する前記ロボットアームに接続されるエンドエフェクタ(1)と、接点配線を配したクサビ状空隙を備え前記付き当て面を係合する着脱可能な係合部材(300)と、を有し、前記ロボットアームと前記エンドエフェクタとを前記係合部材により係合させることで前記ロボットアームと前記エンドエフェクタとが電気的に導通することを特徴とするマニピュレータである。
(もっと読む)
超音波トリム方法
【課題】超音波振動しつつワークを切断するカッタ刃の研磨を効率良く行なって効率的なトリミング加工を行なうことができる超音波トリム方法を提供する。
【解決手段】本方法を実施するための超音波トリム装置10を構成する多関節型ロボット12の先端のアーム16に超音波発振子26を介して支持された平板状のカッタ刃24を、超音波振動させつつ、アーム16により駆動し、ワーク固定部に固定されたワーク40を切断し、この切断作業の途中に、多関節型ロボット12の駆動によるカッタ刃24の移動可能範囲に配設された研磨部材30に対して、カッタ刃24を多関節型ロボット12に装着したまま刃先を含む平面を研磨部材30に接触する姿勢とし、研磨部材30が圧接された状態で、カッタ刃24を超音波振動させつつ、前記アーム16により押し付けて研磨する超音波トリム方法。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】ロボット手術用のツールメモリベースのソフトウェアの更新を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】ロボット手術用のツールメモリベースのソフトウェアの更新を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
敷ブロックの配置方法、敷ブロック移動用工具、および、その工具を備えた工作機械
【課題】作業者の安全性確保、機械および敷ブロックの破損防止および設置精度の向上に加え、敷ブロックの姿勢変更も容易に行うことができる敷ブロックの配置方法。
【解決手段】敷ブロック1をスピンドル30が保持可能な範囲内のブロック格納エリア28Aに設置しておくブロック準備工程と、スピンドルに装着される主軸装着部、敷ブロックを保持するブロック保持部14およびブロック保持部を水平な旋回軸を中心に旋回させる旋回機構15を有する敷ブロック移動用工具10をスピンドルに装着する工具装着工程と、相対移動により、敷ブロック移動用工具によって敷ブロックをテーブル28のワーク載置位置に配置するブロック配置工程とを備え、ブロック配置工程は、敷ブロックを保持した状態で、敷ブロックの姿勢を変更する動作を含む。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
11 - 20 / 109
[ Back to top ]