
国際特許分類[B25J19/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータに適合する付属装置,例.監視のための,探知のための;マニプレータと関連して使用するために結合または特に適用される安全装置 (1,619)
国際特許分類[B25J19/00]の下位に属する分類
国際特許分類[B25J19/00]に分類される特許
101 - 110 / 820
モーター、ロボットハンドおよびロボット
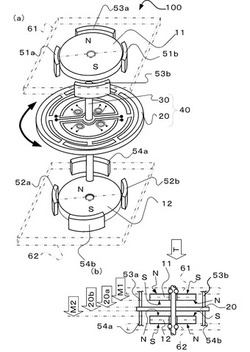
【課題】高出力が得られるコアを備えるコイルと、コアを備えない配線と、を備え電流の切換頻度を少なくすることにより、ブラシの長寿命化を実現する小型モーターを提供する。
【解決手段】回転可能に支持された回転軸の中心に直交し、前記回転軸に固定される回転体と、基体に固定され円周方向にN極とS極とが交互に配置された磁石と、を備え、前記回転体は、前記回転軸の回転中心を通る放射状の直線に平行に延伸された1以上の駆動配線と、円周状に配置された複数の渦巻状導体配線と、前記渦巻状導体配線内に配置されたコアと、前記駆動配線に接続された第1整流子と、前記渦巻状導体配線に接続された第2整流子と、を備え、前記第1整流子に接触し、電力を供給する第1ブラシと、前記第2整流子に接触し、電力を供給する第2ブラシと、を備え、前記渦巻状導体配線は、前記回転軸の軸方向の平面視において、前記駆動配線と重ならないモーター。
(もっと読む)
ケーブルを通すための通路を有するボールジョイント

【課題】ケーブルを通すことができるボールジョイントを提供する。
【解決手段】ソケット11を規定するボールハウジング10と、ボールヘッド22およびボールピン24を有するボールピボット20とを有するボールジョイント1が提供され、ボールヘッド22はソケット11内に配置される。ボールハウジング通路14がボールハウジング10を貫通し、ボールピン通路25がボールピン24を貫通し、ボールヘッド通路23がボールヘッド22を貫通する。ボールピン通路25、ボールヘッド通路23およびボールハウジング通路14は、ボールジョイント1を通ってケーブル2を通すために互いに通じている。ボールハウジング通路14に接続された通路を有するリミッタがソケット11の内部表面から延びてもよい。リミッタはソケット11内でのボールヘッド22の無制限の回転を防ぐ。
(もっと読む)
塗装ロボット及び塗装システム
【課題】塗装ブースを小型化することが可能な塗装ロボット及び塗装システムを提供する。また、ケーブルを覆うケーブル保護部材を省略することが可能な塗装ロボット及び塗装システムを提供する。
【解決手段】 塗装ロボット50は、塗装ブース20の側壁22に固定される固定部62と、固定部62に対して旋回可能に設けられる旋回部64と、旋回部64に設けられるアーム66と、アーム66の先端部に設けられる塗装ガン68と、を備え、側壁22に固定される固定部62の固定面120に、ケーブル92a、92bを引き込むケーブル引込部112a、112bが設けられる。
(もっと読む)
直流モーター、直流モーターを搭載したロボットハンド、およびロボット
【課題】小型で高トルクの直流モーターの提供。
【解決手段】回転軸112の中心から所定角度毎に、N極またはS極の何れかの極性に交互に着磁した円板形状の永久磁石をローター110とし、ローター110の着磁面と向かい合わせて電流経路基板120を設ける。電流経路基板120には、ローター110の回転軸112を中心として所定角度の中心角を有する扇形形状の半径部分に沿って形成した往き側経路と、扇形形状の円弧部分に沿って形成した戻り側経路とを少なくとも一部に含んだ第1の電流経路と、第1の電流経路の往き側経路と戻り側経路とに囲まれた扇形形状の領域内の位置に、渦巻き状に形成した電流経路を少なくとも一部に含む第2の電流経路とを形成する。ローター110からの磁界の下で第1および第2の電流経路に電流を流すと、ローレンツ力および磁力を用いて回転トルクを発生させることができるので、小型で高トルクな直流モーターを構成できる。
(もっと読む)
伸縮アクチュエータ
【課題】軸を曲げた状態で回転運動を軸方向の運動に変換することが可能な、サービスロボットの駆動源として適宜な伸縮アクチュエータを提供する。
【解決手段】回転駆動手段と、該回転駆動手段に駆動されて軸方向の長さが変わる回転・軸長変換手段と、該回転・軸長変換手段を中に収め前記回転駆動手段の筐体に接合されて回転に伴う前記回転・軸長変換手段の全体形状の変形を規制する規制手段と、を備え、前記回転・軸長変換手段が、2つの部材から構成され、少なくとも一つが螺旋形状を有し回転により二つの部材の係合位置が変わって伸縮し、前記螺旋形状の他の部材を受け入れて係合する軸方向に繰り返し現れる部分の軸方向の寸法が、該部分に嵌りこんで係合する他の部材の形状の軸方向の寸法に、前記回転・軸長変換手段が曲げられたときに前記2つの部材が相互移動可能なようにさらに軸方向の隙間を加えたものにされる。
(もっと読む)
形体順応型表示装置
【課題】人に触れる機会の多いロボットには、顔を付けることが、求められている。無表情な状態や、表情の微妙な動きのズレは、違和感を感じるという問題がある。このような問題点を解決すべく、人間型骨格に馴染み、人間の表情と同様の動きを表示出来る、形体順応型表示装置を提供する。
【解決手段】凹凸や曲面のある物体へ、表示装置を密着して貼り付け可能とするため、フレキシブル基板上の単位画素間に連結部、と空隙部、とを設けてなり、前記空隙部は、前記単位画素を囲む様に配置する。フレキシブル基板上の単位画素間に設けてなる前記連結部は、伸縮性を持たせたい方向に対して、斜めに配置する。
(もっと読む)
支持装置
【課題】荷重を受けた場合に、支持する複数箇所にて確実に分散することができると共に、それぞれの支持箇所の耐荷重に応じて適切な荷重の分散を容易にできる支持装置を提供する。
【解決手段】第一部位21に荷重Pを受け得る荷重受体20と、荷重受体20の第二部位22を非弾性体により支持する第一回転支持体31と、荷重受体20のうち第二部位22より第一部位21側に位置する第三部位23を弾性体により支持し、第一部位21に受ける荷重Pが無荷重の場合において荷重受体20が受け得る荷重Pの方向に予圧縮または予引張を付与した状態に設けられる弾性支持体40を備える。弾性支持体40による予圧縮または予引張の力F0は、荷重受体20の第一部位21に荷重Pを受けることによって弾性支持体40に生じる荷重F1より大きな力に設定される。
(もっと読む)
モーター、ロボットハンド及びロボット
【課題】位置センサー及び制御回路を備え、信頼性が高く小型のブラシレスモーターを提供する。
【解決手段】モーターは、円柱状であり、円周方向にS極及びN極を交互に有する回転子と、回転子の円形面に接続された回転軸と、円形面に対向する第1の面を有し、第1の面に円周方向に沿って配列された複数の渦巻状導体パターンを有する半導体素子と、を備え、前記半導体素子は、前記渦巻状導体パターン内に位置するコアと、前記渦巻状導体パターンに流れる電流を制御する制御回路と、前記回転子の磁極の位置を検出する位置センサーと、を含む。
(もっと読む)
コアレスモーター、ロボットハンドおよびロボット
【課題】同一方向の回転であれば電流の流れる方向を切り替える必要が無く、よって簡単な構造でブラシレスとし、且つコアレスレスモーターを提供する。
【解決手段】回転軸と、前記回転軸に固定され、前記回転軸の軸方向にN極とS極とを配置し、前記回転軸の回転中心を中心として円柱状に形成された永久磁石を備える磁石体と、前記磁石体の前記永久磁石の前記N極面、もしくは前記S極面に対向配置される第1の面を有し、前記磁石体の前記回転中心において前記磁石体と相対的に回転可能に配置される半導体装置と、を備え、前記半導体装置は、前記第1の面に前記回転中心から放射状に配置される1以上の導体配線と、前記半導体装置は、少なくとも前記導体配線に流す電流の方向を切り替える回路を含む駆動回路と、前記磁石体と前記半導体装置との相対的な回転位置を検出する検出回路と、を含むコアレスモーター。
(もっと読む)
ロボット用回転関節における回転の機械的制限
【課題】機構の複雑化・大型化や周囲との干渉、美観の低下を抑制しつつ、許容回転角度の範囲が広い範囲に設定されたロボット用回転関節における回転を機械的に制限する。
【解決手段】ロボット用回転関節は、フレームと、フレームの内部に配置され中心軸回りに回転する略円柱形状の回転軸体と、回転軸体の回転を機械的に制限するメカニカルストッパと、を備える。メカニカルストッパは、穴を有すると共に、フレームにおける回転軸体の側面に対向する位置に固定されたフックと、両端が回転軸体の側面に固定されたワイヤであって、フックの穴を一度通ると共に、回転軸体の側面に沿って巻き付けられたワイヤと、を含む。
(もっと読む)
101 - 110 / 820
[ Back to top ]