
国際特許分類[B25J19/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータに適合する付属装置,例.監視のための,探知のための;マニプレータと関連して使用するために結合または特に適用される安全装置 (1,619)
国際特許分類[B25J19/00]の下位に属する分類
国際特許分類[B25J19/00]に分類される特許
71 - 80 / 820
伸縮駆動素子
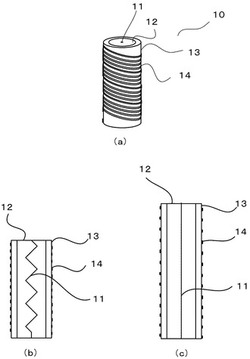
【課題】変形に対する抵抗が少ない電極を有するアクチュエーターを提供する。
【解決手段】伸縮可能な筒状の第1の部位と、第1の電極と、第2の電極と、高分子電解質層と、を含み、前記第1の部位の内部は、前記高分子電解質層で埋められており、前記第1の電極は、前記第1の部位の周囲に接して螺旋状に配置され、前記第2の電極は、前記高分子電解質層の内部に埋められ、前記第1の部位の伸縮に伴い変形することを特徴とする。
(もっと読む)
ロボットコントローラー

【課題】パワーデバイスの冷却に用いられるヒートシンクの種別が増えることを抑えつつ、ロボットコントローラーの小型化を図ることの可能なロボットコントローラーを提供する。
【解決手段】複数の交流モーターを有したロボットの動きを複数の交流モーターの各々の駆動によって制御するロボットコントローラーであって、直流電圧を多相交流電圧に変換して交流モーターに出力する複数のパワーデバイス43B,43Fと、パワーデバイス43B,43Fが実装される複数のモータードライバー基板40とを備え、複数のモータードライバー基板40の各々は、1つのヒートシンク44と、1つのヒートシンク44に取り付けられた2つのパワーデバイス43B,43Fとを備える。
(もっと読む)
圧電アクチュエーター、ロボットハンド、ロボット
【課題】磨耗粉を除去し、耐久性が優れる圧電アクチュエーターを提供する。
【解決手段】圧電アクチュエーター10は、ローター40と、ローター40の外周部に当接して、ローター40を回転させる振動体20と、ローター40の回転外周に接触するように配置される可撓性を有する環状のベルト70と、ベルト70を懸架するローラー61,65と、を備える。ローター40と振動体20との接触面に発生する磨耗粉は、ベルト70によって捕捉され除去される。
(もっと読む)
ロボット
【課題】ケーブル等と周辺機器との干渉をより抑制できるようにしたロボットを提供する。
【解決手段】
基台1に設けられたアーム2〜4に対して第1軸回りに回転するように連結される胴体底部24、第1軸の延長線上に胴体底部24に設けられ、ケーブルを挿通可能な通過口25、胴体底部24から第1軸の延長線に沿って延設された第1延在部22、第1延在部22と間隙を有して並行して配設される第2延在部23、第1延在部22と第2延在部23との少なくともいずれかの先端側に取り付けられて第1軸に直交する第2軸回りに揺動する揺動体7、第1軸の延長線上に対してオフセットした位置で胴体底部24に支持され、第2軸回りに揺動体を揺動させるモータ51、第2軸に直交する第3軸周りに回転するように揺動体7に支持されケーブルが接続されるエンドエフェクタを保持可能な回転体8を有して構成する。
(もっと読む)
電動モーター、ロボット及び制動装置
【課題】制動ブレーキを一体化した電動モーターを提供する。
【解決手段】ローター121とステーター122を有する電動モーター100であって、
前記ローター121の一部は、運動軌跡となる、第1の摩擦部2121を有しており、
前記ステーターの少なくも一部には、前記第1の摩擦部2121と接触して機械的な摩擦力により前記ローターの回転を制動及び停止させる第2の摩擦部2110と、前記電動モーター100に電力が供給されているときには前記第2の摩擦部2110を前記第1の摩擦部2121から離間させて制動を実行させず、前記電動モーター100への電力供給が遮断されたときには前記第2の摩擦部2110を前記第1の摩擦部2121に押しつけて制動を実行させる制動アクチュエーター部2100を設けた電動モーター。
(もっと読む)
多関節ロボット
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
ロボットコントローラ
【課題】電源コネクタが電源モジュールに接続されたままでこれらモジュールが分離されることがなく、モジュール間の電気接続部分がむき出しになることがないようにする。
【解決手段】中継コネクタ5を電源モジュール2に固定される第1のコネクタ6と、CPUモジュール3に固定される第2のコネクタ7とから構成し、第2のコネクタ7と第1のコネクタ6との結合時に第2の凸部7bと第3の凸部7cとの間に形成された第1の凹部7dと第1の凸部6bとが嵌合し、且つ第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fが一直線に対向し連通する構成とし、電源コネクタ4のアース端子4cを第2のアース端子挿通孔部7e、第1のアース端子挿通孔部6c及び第3のアース端子挿通孔部7fに挿入する構成とした。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
ロボット
【課題】ロボットにおいて、エンコーダデータを確実に保持しつつバックアップ用電池の交換作業の容易化を図る。
【解決手段】ロボットは、主電源部とロボット本体部と外部バックアップ電源部とを備える。ロボット本体部は、サーボモータと、エンコーダデータを記憶するエンコーダ部と、エンコーダ部にバックアップ電源を供給する内部電池を含む内部バックアップ電源部とを有する。外部バックアップ電源部は、ロボット本体部の外部に設けられ、エンコーダ部にバックアップ電源を供給する。主電源部による供給電圧Vsは外部バックアップ電源部による供給電圧Vbat1より大きく、供給電圧Vbat1は内部バックアップ電源部による供給電圧Vbat2より大きく、供給電圧Vbat2はエンコーダ部の最低動作電圧Vsysより大きい。
(もっと読む)
回転駆動装置
【課題】チャンバ内に配置された動力源から有効に放熱をすることが可能な回転駆動装置を提供すること
【解決手段】本発明の回転駆動装置は、隔壁と、駆動ユニットと、支持体とを具備する。隔壁は、搬送機構が収容されるチャンバに固定され、チャンバに導通する真空室を画成する。駆動ユニットは、真空室に収容され、搬送機構を駆動する。支持体は、上記真空室の外部に臨む放熱面を有し、上記隔壁に固定され上記駆動ユニットを支持する。
この構成により、真空室に収容された駆動ユニットにおいて発生する熱は、支持体に伝導し、放熱面から大気中に放熱される。このため、駆動ユニットにおいて発生する熱を有効に放熱させることが可能となる。
(もっと読む)
71 - 80 / 820
[ Back to top ]