
国際特許分類[B25J19/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータに適合する付属装置,例.監視のための,探知のための;マニプレータと関連して使用するために結合または特に適用される安全装置 (1,619)
国際特許分類[B25J19/00]の下位に属する分類
国際特許分類[B25J19/00]に分類される特許
51 - 60 / 820
腰部負担軽減具
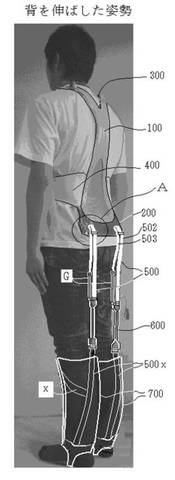
【課題】農業,工業,医療・福祉現場等で働く人々の,前屈時の腰の負担を大きく軽減する実用的腰部負担軽減具を提供する。
【解決手段】モーメントアーム200にベルトリターン部材とベルト二重巻き部材とベルトセパレ−タを設置し、モーメントアーム200の無負荷時と負荷時に応じてアーム駆動部によりセパレ−タ作動アームを作動させて、セパレ−タを前記ベルト二重巻き部材に巻き付けた連結ベルト500の二重巻き間に出し入れ可能にしたアーム駆動部を有して成り、前記連結ベルト500のフリー側は牽引ゴム紐を介して弾性伸縮ベルト600又は中間連結ベルト500Xに連結してなることを特徴とする。歩行時は弾性伸縮ベルト600の張力の解除と連結ベルト500のたるみを自動的に吸収する一方,前屈時は連結ベルト500を強固に固定して,ゴムベルトの張力により腰の負担を大きく軽減する。
(もっと読む)
マニピュレーター、マニピュレーターの駆動方法およびロボット

【課題】複雑で大量のデータを処理してアームを制御することによって生じる制御駆動時間の遅れが発生しない、慣性機構、ジャイロ装置によってリアルタイムにアームの振動を抑制し、正確な停止位置が維持できるマニピュレーターと、そのマニピュレーターを用いたロボットを実現する。
【解決手段】回転軸と、前記回転軸の軸方向に交差する面で回転可能に前記回転軸を介して接続される第1アームと第2アームと、を備え、前記第1アームまたは前記第2アームの少なくとも一方に、前記回転軸の軸方向に交差する方向の回転軸中心を有するフライホイールを備えるマニピュレーター。
(もっと読む)
分散制御システム
【課題】移動体における制御対象又は副制御ユニットの増減に容易に対応可能な分散制御システムを提供する。
【解決手段】分散制御システム400の主制御ユニット410は、制御対象430と制御対象430に付与されたアドレスとの関係が記憶された第一の記憶部411と、制御対象430に関する個別制御データをアドレスの順に並べた制御データを生成する制御データ生成部412と、制御データをブロードキャスト方式で送信する制御データ送信部414と、を備え、副制御ユニット420は、当該副制御ユニット420に対応する制御対象430のアドレスが記憶された第二の記憶部421と、第二の記憶部421に記憶されたアドレスに基づいて、個別制御データを取得する個別制御データ取得部422と、取得された個別制御データに基づいて、制御対象430の駆動を制御する制御対象制御部430と、を備える。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、コストを増加させずに、ケーブルの耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、フレームあるいはアームカバーと一体構造を有するケーブル保持部を提供し、ケーブルが固定される端部はアームの回動中心軸と平行とする。
(もっと読む)
ロボット用外装部品
【課題】本発明は、ロボット用外装部品の生産性と物性バランスとを従来技術に比して損なうことなく、特殊な使用環境下での耐久性と意匠性のための外観保持性とに優れたロボット用外装部品を提供することを目的とする。
【解決手段】本発明のロボット用外装部品は、オキシメチレンコポリマー(A)と充填材(B)と脂肪酸(C)とを含むオキシメチレン樹脂組成物を含有する。また、該オキシメチレンコポリマー(A)が、オキシメチレン成分と、該オキシメチレン成分以外のオキシアルキレン成分とを含み、該オキシアルキレン成分の含有割合が、該オキシメチレン成分に対して、0.3〜1.3モル%であることが好ましい。
(もっと読む)
水平多関節ロボット
【課題】アームの回動範囲を規制し、ロボット自身およびツールの破損を防止する。
【解決手段】第1アーム30に形成され、第2アーム40の回動範囲を規制する第1突起部32と、第2アーム40に形成され、第1突起部32と当接可能な第2突起部42と、第1アーム30に形成され、平面視で第2突起部42の移動軌道上であり、第1突起部32から離れた位置に形成された第1ネジ穴35aおよび第2ネジ穴35bと、を備え、第1突起部32は第1アーム30と一体に形成され、第2突起部42は第2アーム40と一体に形成されている。
(もっと読む)
アクチュエーター装置、多軸駆動装置、並びにロボット装置
【課題】多軸マニピュレーターやロボット・アーム、脚構造、蛇型ロボットなどの多軸駆動機構の複数個所に用いるアクチュエーター装置を提供する。
【解決手段】トルク・センサー14は、マウント部品を介して、クロスローラー・ベアリングなどの軸受17に接続される。図示の通り、トルク・センサー14は、アクチュエーター装置10の固定部ケース19に対して外輪駆動である。また、出力軸フレーム20の取り付け面を、軸受17よりも固定部ケース19側にオフセットさせた位置に設けている。出力軸フレーム20を取り付けた後も、アクチュエーター装置10の出力軸方向の全長が変わらず、占有空間が増加しない。
(もっと読む)
可撓性長尺物案内装置を有する生産機器
【課題】保持部材の挙動を安定化できて移動体のスピードアップ化に寄与でき、さらに可撓性長尺物の耐久性向上を図ることができるようにする。
【解決手段】可撓性長尺物案内装置3は、断面がU字形のコンベックス状をなす金属板製帯体からなる保持部材4と案内壁体5とを備えている。保持部材4はその一端部が直線的に往復移動する移動体1に連結され、途中部が湾曲されて方向反転され、他端部が案内壁体5の内部底面5aに固定されている。この保持部材4を、その両面のうち凹状をなす側の面部4aが湾曲部Rにおいて外側となる形態で移動体1に連結し、可撓性長尺物2を、保持部材4の外側となる面部4aに非接着状態に添設している。
(もっと読む)
アクチュエータ、繰り出し推進アクチュエータおよび足首の底屈・背屈運動支援装置
【課題】多様な方向の変位を発生可能なアクチュエータを提供する。
【解決手段】繰り出し推進アクチュエータ4は、複数のリニアアクチュエータ2_1〜2_3を備える。各リニアアクチュエータ2の偏平チューブ10は可撓性を有し、非加圧状態において偏平断面形状となり、加圧状態において略円形断面形状となる。スライダ20は、偏平チューブ10の屈曲部14を形成し、偏平チューブ10に沿って移動可能である。複数のリニアアクチュエータ2_1〜2_3それぞれの偏平チューブ10は、それぞれの軸が略平行に配置されるともに、それぞれに対する圧力が独立に制御可能である。
(もっと読む)
多関節型産業用ロボット
【課題】円滑な作業の妨げとならないようにしてエフェクタ用ケーブルを取り回しつつ、手首部の構成を全体として小型化する。
【解決手段】ロボット1の手首部3が、アーム部2に対して第1手首軸線S周りに回転する第1可動部14、第2手首モータ25により第1可動部14に対して第2手首軸線B周りに回転駆動される第2可動部15、第3手首モータ26により第2可動部15に対して第3手首軸線T周りに回転駆動される第3可動部16、及び第3可動部16に装着されるエンドエフェクタ8に電力等を供給するエフェクタ用ケーブル9が挿通されるケーブル挿通部70を有する。ケーブル挿通部70は、第1手首軸線S上に位置するようにして第1可動部14に設けられ、第2及び第3手首モータ25,26は、ケーブル挿通部70を第1手首軸線Sに垂直な方向に挟むようにして第1可動部14に取り付けられる。
(もっと読む)
51 - 60 / 820
[ Back to top ]