
国際特許分類[B25J19/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータに適合する付属装置,例.監視のための,探知のための;マニプレータと関連して使用するために結合または特に適用される安全装置 (1,619)
国際特許分類[B25J19/00]の下位に属する分類
国際特許分類[B25J19/00]に分類される特許
61 - 70 / 820
アクチュエータ、繰り出し推進アクチュエータおよび足首の底屈・背屈運動支援装置
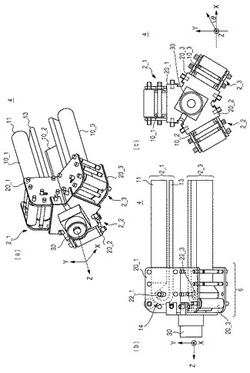
【課題】多様な方向の変位を発生可能なアクチュエータを提供する。
【解決手段】繰り出し推進アクチュエータ4は、複数のリニアアクチュエータ2_1〜2_3を備える。各リニアアクチュエータ2の偏平チューブ10は可撓性を有し、非加圧状態において偏平断面形状となり、加圧状態において略円形断面形状となる。スライダ20は、偏平チューブ10の屈曲部14を形成し、偏平チューブ10に沿って移動可能である。複数のリニアアクチュエータ2_1〜2_3それぞれの偏平チューブ10は、それぞれの軸が略平行に配置されるともに、それぞれに対する圧力が独立に制御可能である。
(もっと読む)
多関節型産業用ロボット

【課題】円滑な作業の妨げとならないようにしてエフェクタ用ケーブルを取り回しつつ、手首部の構成を全体として小型化する。
【解決手段】ロボット1の手首部3が、アーム部2に対して第1手首軸線S周りに回転する第1可動部14、第2手首モータ25により第1可動部14に対して第2手首軸線B周りに回転駆動される第2可動部15、第3手首モータ26により第2可動部15に対して第3手首軸線T周りに回転駆動される第3可動部16、及び第3可動部16に装着されるエンドエフェクタ8に電力等を供給するエフェクタ用ケーブル9が挿通されるケーブル挿通部70を有する。ケーブル挿通部70は、第1手首軸線S上に位置するようにして第1可動部14に設けられ、第2及び第3手首モータ25,26は、ケーブル挿通部70を第1手首軸線Sに垂直な方向に挟むようにして第1可動部14に取り付けられる。
(もっと読む)
アームカバー及びスカラ型ロボット
【課題】アーム基体とアームカバーとに囲まれた収容空間をアームが有するスカラ型ロボットにおいて、該収容空間で回転及び昇降する出力軸から飛散する潤滑剤の汚染を該収容空間内で抑えることの可能なスカラ型ロボットを提供する。
【解決手段】アーム基体12aに搭載されて出力軸17に連結されるとともに、出力軸17を駆動するための信号を受けて出力軸17を駆動する駆動部と、アーム基体12aに取付けられるとともに、出力軸17が挿通されるカバー挿通部を有し、出力軸17のうちで少なくとも駆動部が連結される部分を駆動部共々覆う逆椀状をなす成型体のアームカバー20とを備えるスカラ型ロボットであって、カバー挿通部が、アームカバー20の外側に延設される外側スリーブ24と、アームカバー20の内側に延設される内側スリーブ25とから構成され、外側スリーブ24と内側スリーブ25とが先細り形状である。
(もっと読む)
スカラ型ロボット
【課題】 防塵防滴性に優れるとともに、モータの過熱を防止できるスカラ型ロボットを提供すること。
【解決手段】 作動軸32を水平方向に移動するスカラ型ロボットAに、作動軸32の側方を覆うカバー部材31,58と、作動軸32を駆動するモータ34と、カバー部材31,58の上部に配置され、作動軸32と連動し上下する上部ジャバラ状部材50と、カバー部材の下部に配置され、作動軸32と連動し上下する下部ジャバラ状部材60とを設けた。また、カバー部材31と上部ジャバラ状部材50とを挿通穴部31aを介して連通させ、カバー部材58と下部ジャバラ状部材60とを連結部58cを介して連通させた。そして、モータ34を、上部ジャバラ状部材50と下部ジャバラ状部材60との間に配置した。
(もっと読む)
回転体の回転範囲規制機構および産業用ロボット
【課題】塵埃の発生や異音の発生を抑制することが可能な回転体の回転範囲規制機構を提供する。
【解決手段】支持体5に対して360°以上回転可能な回転体の回転範囲を規制する回転範囲規制機構31は、支持体5に揺動可能に取り付けられる揺動部材45と、揺動部材45に当接して揺動部材45の一方側の揺動範囲を規制する第1規制部材46と、揺動部材45に当接して揺動部材45の他方側の揺動範囲を規制する第2規制部材47と、回転体に固定されるとともに、揺動部材45に係合して、揺動部材45が第1規制部材46に当接する第1規制位置と揺動部材45が第2規制部材47に当接する第2規制位置との間で、揺動部材45を揺動させる係合部材48と、磁気吸引力によって第1規制位置で揺動部材45を保持する第1磁気保持機構51と、磁気吸引力によって第2規制位置で揺動部材45を保持する第2磁気保持機構52とを備えている。
(もっと読む)
ロボット
【課題】 安価につくとともに、配線や配管を収容してカバーの上部から突出する部分が破損した場合には、その取り換え作業が容易になるロボットを提供すること。
【解決手段】 回転軸21bを中心として水平方向に回転可能に設けられた第2アーム20の先端に中空の作動軸32を駆動装置の作動により上下移動および軸周り方向への回転を可能にして設けるとともに、第2アーム20の上部に作動軸32と駆動装置とを覆うカバー31,51を設けたロボットAを構成した。そして、カバー31の上面に挿通穴31aを設けて、作動軸32の上端に、挿通穴31aを挿通する中空シャフト45を着脱可能に連結した。また、配線52aおよび配管52bをカバー51の所定部分から延ばして中空シャフト45の上端開口から中空シャフト45の内部に挿入し中空シャフト45および作動軸32の内部を通して作動軸32の下部側から外部に引き出した。
(もっと読む)
ロボット
【課題】レゾルバを駆動する駆動回路が搭載されたロボットにおいて、該駆動回路への機械的な負荷及び熱的な負荷が低減されるロボットを提供することにある。
【解決手段】基台11に対して回転軸15を回動させるモーターM1と、モーターM1の回転角度を検出するレゾルバR1の駆動回路が形成された駆動回路基板25とを備えたロボットであって、駆動回路基板25が、該駆動回路基板25における取り付け面30と基台11とに面接触した状態で該駆動回路基板25と該基台11とに挟まれる熱伝導性の弾性部材33を介して該ロボットの基台11に対して移動可能に取り付けられている。
(もっと読む)
ロボット
【課題】エンドエフェクタを駆動する駆動流体圧シリンダと従動流体圧シリンダを備えると共に、メンテナンス性を向上させるようにしたロボットを提供する。
【解決手段】基体に連結されるリンク(腕部)20と、リンクに連結されるエンドエフェクタ(ハンド)22と、エンドエフェクタの外部に配置されて作動用流体圧を供給する駆動流体圧シリンダ74と、駆動流体圧シリンダに流体圧供給管76を介して接続されて作動用流体圧が供給されるときにエンドエフェクタ22を作動させる従動流体圧シリンダ78とを備えるロボットにおいて、駆動流体圧シリンダ74と従動流体圧シリンダ78とを一体として固定する固定部材84を備えると共に、固定部材84を基体14に接続する。
(もっと読む)
ケーブル支持部材
【課題】耐久性が高く、製造性が良好なケーブル支持部材及びケーブル支持装置を提供すること。
【解決手段】複数の駒部材を連ねる弾性部材に伸縮性を持たせることで、ケーブル支持部材に反対方向の荷重が掛かった場合でも、ケーブル支持部材の駒部材を破壊することなく、高い耐久性を達成できる。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】電源スイッチがオンされると、スイッチング制御回路が動作を開始し、コンバータ回路のスイッチング素子のオンオフ制御で制御用電源がCPUに供給され、自己の動作電源をコンバータ回路からダイオードを介して給電する。CPUにより、コンタクタがオンされてロボット用電力が供給される。電源スイッチがオフされると、CPUにより、給電監視手段によるダイオードブリッジへの給電停止の検出をもってスイッチのオフ状態が判断され、平滑コンデンサの充電電荷を電源として動作する期間中に、ロボット本体の停止制御の実行後に前記コンタクタがオフされる。
(もっと読む)
61 - 70 / 820
[ Back to top ]