
国際特許分類[B60L7/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 車両用電気的制動方式一般 (1,009)
国際特許分類[B60L7/00]の下位に属する分類
発電制動 (29)
回生制動 (463)
機関により駆動される発電機をもつ車両の原動機に回生力を加えて制動するもの (46)
回生制動と結合する発電制動 (52)
付加的に機械的または電磁的制動を行なうもの (368)
渦電流制動 (12)
国際特許分類[B60L7/00]に分類される特許
21 - 30 / 39
4輪駆動車の制御装置

【課題】界磁電流を速やかに低減してモータの迅速な停止を実現し、次制御動作への移行時間を短縮することを課題とする。
【解決手段】エンジン15で前輪12,13が駆動され、発電機23で得られた電力で動作するモータ20で後輪18,19が駆動され、モータ20と後輪18,19との間に設けられた電磁クラッチ22を介して後輪18,19が選択的に駆動される4輪駆動車100の走行を制御する4輪駆動車の制御装置において、モータ20を停止する際に、界磁電流消費装置25によってモータ20の界磁電流を強制的に放電させて消費するように構成される。
(もっと読む)
電動車両の停止制御方法

【課題】廉価なホールICを用いて、しかも、誤差成分の影響を最小にして高精度に電動車両の停止制御を行うようにする。
【解決手段】電動車両100は、操作レバー82と、車軸102と、操作レバー82からの操作指示に基づいて回転制御されるモータ10と、モータ10の回転力を車軸に伝達する伝達機構106と、モータ10の回転を制動するための電磁ブレーキ108と、モータ10の回転に伴って生成される一連のパルス信号に基づいてモータ10の回転速度を検出する速度検出回路50を有する。そして、操作レバー82からの操作指示がモータ10の回転停止を示し、且つ、モータ10の回転が電子制御ユニット104によって減速制御される時点から、速度検出回路50からのパルス信号の2回の立ち下がりを経過した時点を、モータ10の回転を電磁ブレーキ108によって停止させる契機の基準時点とする。
(もっと読む)
車両およびその制御方法
【課題】車両の安定性が悪化するのを抑制する。
【解決手段】モータMG2のインバータ42のトランジスタのいずれかに異常が生じて閉回路が形成されたときには、ブレーキ64a,64bから前輪63a,63bに制動トルクを出力する。これにより、モータMG2の回転に伴って後輪66a,66bに作用する制動トルクとブレーキ64a,64bから前輪63a,63bに出力する制動トルクとがアンバランスになることによる車両の安定性の悪化を抑制することができる。
(もっと読む)
車両駆動制御装置
【課題】電動機の電動力を利用した運転領域を広くし、発電機の制御時定数より小さい外乱が加わった際に電動機やその取付元に振動が発生することを抑制し、電動機の電動力によって第2車軸を駆動している状態から駆動しない状態に切り換える際に過電流が発生することを防止する。
【解決手段】電動機12の停止制御時に、電動機界磁電流制御手段32により電動機12の界磁電流を低下させながら電動機電機子電流制御手段33により電動機12の電機子電流を制御し、後輪車軸9と電動機12との間のトルク差が電磁クラッチ14において略ゼロになったタイミングで、電動機12から後輪車軸9への駆動力の伝達を遮断するように電磁クラッチ14を開放制御する。
(もっと読む)
全車輪が各々少なくとも1つの回転電気機械に連結されている車両の制動システムの低電圧給電段のための冗長度ハードウェア設計思想
本発明は、道路車両用の電気制動システムであって、道路車両の少なくとも2つの車輪(1)が各々、少なくとも1つの回転電気機械(2)に回転可能に連結され、少なくとも1つの電子車輪制御モジュール(23)が、一車輪の回転電気機械を制御し、各電子車輪制御モジュールにより、大きさ及び符号が定められた制御トルクを問題の車輪に選択的に加えることができ、電気制動システムは、少なくとも2つのサブシステム(A,B)を有し、各サブシステムは、電子車輪制御モジュール(23)のうちの少なくとも1つと、中央電線路と、電力要素を制御するために用いられる電子装置に電力を供給する低電圧給電段とを有し、低電圧給電段は、第1の低電圧電源及び第2の低電圧電源を有し、第1の低電圧電源と第2の低電圧電源は、第1の部分(43A)及び第2の部分(43B)を有する低電圧電線路(43)によって互いに接続され、第1の部分(43A)と第2の部分(43B)は、2つの部分を電気的に分離する装置(430)によって相互に接続され、装置(430)は、2つの部分のうちの一方が不足電圧又は過電流を受けた場合に要望に応じて相互接続を中断することができる電気制動システムに関する。サブシステムのうちの一方(A)の各電子車輪制御モジュール(23)は、第1の部分によって給電され、サブシステムのうちの他方(B)の各電子車輪制御モジュール(23)は、第2の部分によって給電される、電気制動システム。 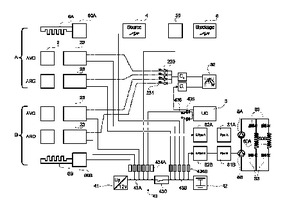 (もっと読む)
(もっと読む)
編成列車のブレーキ制御方法
【課題】先頭車両に続く車両の車輪の摩耗を低減させる。
【解決手段】複数の車両1〜4を連結した編成列車5でブレーキ指令信号により指令されたブレーキ力を各車両1〜4の重量に対応した応荷重信号に基づいて車両1〜4毎に負担するブレーキ力を演算する編成列車のブレーキ制御方法において、雨天時を意味する雨天信号が入力された場合に先頭車両1の応荷重信号を0より大きく1より小さい所定の軽減係数を乗じた値として各車両1〜4毎に負担するブレーキ力を演算するようにしたものである。
(もっと読む)
パーキングロック機構
【課題】本発明は、コンパクトな構造で駐車中の車両の移動を充分防ぐことができるパーキングロック機構を提供する。
【解決手段】パーキングロック機構30は、ホイール11内に当該ホイール11を駆動するモータ12と遊星歯車機構20とを備える電気自動車10に設けられる。パーキングロック機構30は、モータ12の駆動軸15と一体に回転するパーキングロックハブ31と、パーキングロックハブ31と係合することによって駆動軸15の回転を止める係合機構100と、を備える。遊星歯車機構20は、係合機構100よりもホイール11側に配置される。
(もっと読む)
4輪駆動車両の制御装置
【課題】坂路に駐車した場合の車両保持性能を向上させることができる4輪駆動車両の制御装置を提供する。
【解決手段】シフトセレクタのシフトレンジがPレンジにある駐車条件が成立して前輪のパーキングロックが行われている場合は、車両が駐車している路面の勾配θが−θ0≦θ≦θ0の設定範囲内にあるか否かが判定される(ステップS102)。路面勾配θが設定範囲から外れる場合は、後輪と連結されたモータの回転子の回転をロックするようモータの巻線に電流を流すことで後輪のロックを行い(ステップS103)、路面勾配θが設定範囲内にある場合は、後輪のロックを行わない(ステップS104)。
(もっと読む)
車両用ブレーキシステム
【課題】圧力センサの故障に対応でき、圧力センサを用いずにスライディングモード制御を行い得る車両用ブレーキシステムをもたらすことにある。
【解決手段】目標車輪速度と車輪速度との誤差および、目標車輪速度に対する車輪速度の誤差積分値の検出値に基づきスライディングモード制御を行う制御手段9を具え、前記制御手段によって車両の車輪の滑走を制御する車両用ブレーキシステムにおいて、前記車両用ブレーキシステムは、前記目標車輪速度と車輪速度との誤差および誤差積分値の検出値からブレーキシリンダ圧力を推定するロバストVSSオブザーバ10を具え、前記制御手段9は、前記目標車輪速度と車輪速度との誤差および誤差積分値の検出値と、前記ロバストVSSオブザーバ10が求めたブレーキシリンダ圧力の推定値とに基づく全状態フィードバックにより前記スライディングモード制御を行うことを特徴とする、車両用ブレーキシステムである。
(もっと読む)
鉄道車両のブレーキ制御装置
【課題】 乗り心地の向上を図る。
【解決手段】 鉄道車両の目標減速度を設定する目標減速度設定手段1と、鉄道車両の速度を検出する速度検出手段4と、この速度検出手段4により所定の時間間隔で検出された速度の速度差から実減速度を演算する実減速度演算手段5と、目標減速度と実減速度とに差があるときには実減速度を目標減速度に合わせるブレーキ力補正率を演算するブレーキ力補正率演算手段6と、目標減速度に対応したブレーキ力とブレーキ力補正率に対応したブレーキ力とを加算したブレーキ力をブレーキ力発生手段3に指令するブレーキ力指令手段2とを備えたものである。
(もっと読む)
21 - 30 / 39
[ Back to top ]