
国際特許分類[B60T8/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901)
国際特許分類[B60T8/00]の下位に属する分類
ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677)
車両の重量または積荷,例.積荷分布,に応ずるもの (13)
車両の傾斜または方向の変化,例.カーブの通過,に応ずるもの (5)
前輪と後輪の間に異なる制動力を発生することを特徴とするもの (201)
速度条件,例.加速度または減速度,に応ずるもの (1,230)
国際特許分類[B60T8/00]に分類される特許
61 - 70 / 775
車両用制動力制御装置
【課題】簡易な構成でブレーキアシスト制御を実現させること。
【解決手段】運転者のブレーキ操作による制動力の不足分を補うブレーキアシスト制御の実行が可能な制動システムと、運転者のブレーキ操作に伴い作動してオン信号を出力するブレーキスイッチ12と、運転者のブレーキペダル10に対するペダル踏力が所定値を超えたときにオン信号を出力する踏力スイッチ11と、を備え、ブレーキスイッチ12のオン信号が検出されてから踏力スイッチ11のオン信号が検出されるまでの時間に基づいて前記ブレーキアシスト制御の実行要否判定を行うこと。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法

【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切なタイミングで終了させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、補助制御の実行中において、車輪速度センサを用いて演算される車体減速度及び車体加速度センサを用いて演算されるGセンサ値Gの少なくとも一方に基づき補助制御の終了条件が成立したか否かを判定する(ステップS122,S125,S126)。そして、ブレーキ用ECUは、終了条件が成立したと判定された場合(ステップS122,S125,S126のうち何れか一つの判定結果がYES)に、補助制御を終了する(ステップS123,S124)。
(もっと読む)
車両用制動装置
【課題】マスタシリンダ圧力を検出する圧力センサの零点補正値を適切に更新することができる車両用制動装置を提供する。
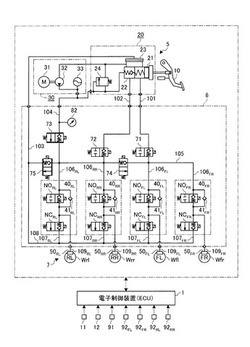
【解決手段】マスタシリンダ23により調整された液圧の圧力に対応する出力値を検出する油圧センサ40と、マスタシリンダ23の圧力が0となる油圧センサ40の出力値を零点補正値として記憶し、該零点補正値に基づいて油圧センサ40の出力値を補正してマスタシリンダ圧力を算出するマスタシリンダ圧力算出部52と、を備える車両用制動装置20において、油圧センサ40により検出された出力値が、マスタシリンダ圧力算出部52に記憶されている零点補正値より小さい場合に、該出力値を新たな零点補正値として設定し、零点補正値を更新する零点補正値更新部54を備える。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両の走行する路面の勾配情報に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切なタイミングで開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の走行する路面の勾配情報を取得し、該勾配情報に基づき第1の減速判定値DV_stを補正する(ステップS79)そして、ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超えた場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすること。
【解決手段】サイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、第1サイクル時間判定手段でサイクル時間が第1の所定時間以内であると判定され、且つ、車輪加速度判定手段で車輪加速度が所定値以上であると判定されたことを条件として、今回の増圧制御の開始時点におけるブレーキ液圧と目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段28と、前記決定された補正時間及び補正増圧レートで補正する補正手段29とを備える。
(もっと読む)
ブレーキ操作装置およびブレーキ液圧制御装置
【課題】ブレーキペダルの操作方向の変化を的確に取得する。
【解決手段】マスタシリンダのヒステリシス特性が大きい場合には、ブレーキペダルのストロークの変化がマスタシリンダ液圧の変化に遅れて変化する。そのため、時間t2において、マスタ圧対応目標減速度が増加傾向から減少傾向に変化した場合には、ストローク対応目標減速度が変化しなくても、ブレーキペダルの操作方向が踏込み方向から戻し方向に切り換わったと決定される。このように、マスタ圧対応目標減速度とストローク対応目標減速度とのいずれか一方が変化しないで他方が変化した場合に、ブレーキペダルの操作方向が変化したと取得されるため、ブレーキペダルの操作方向の変化を的確に取得することが可能となる。
(もっと読む)
ハイドロブレーキ制御装置
【課題】ブレーキアシスト制御が機能している状態で、アンチロックブレーキが作動しても、所望のブレーキ制動力を維持可能とするハイドロブレーキ制御装置を提供することを目的とする。
【解決手段】運転者によるブレーキ操作部材の操作量に応じて加圧した作動流体の供給を受けて、車輪に制動力を付与するホイールシリンダと、ホイールシリンダに供給する作動流体を加圧する動力液圧源と、車輪がロックしないように作動流体のホイールシリンダへの供給を一時遮断するアンチロックブレーキと、動力液圧源で圧力が増大された作動流体をホイールシリンダに供給する場合に、アンチロックブレーキが作動すると、所定の増圧処理を行うブレーキ制御部とを備えるハイドロブレーキ制御装置とする。
(もっと読む)
61 - 70 / 775
[ Back to top ]