
国際特許分類[B60W10/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615)
国際特許分類[B60W10/00]の下位に属する分類
駆動系のクラッチの制御を含むもの (1,598)
推進装置の制御を含むもの (11,419)
変速伝動装置の制御を含むもの (2,573)
差動装置の制御を含むもの (207)
制動装置の制御を含むもの (2,072)
操向装置の制御を含むもの (589)
懸架装置の制御を含むもの (123)
エネルギ貯蔵手段の制御を含むもの (1,731)
燃料電池の制御を含むもの (13)
付属装置の制御を含むもの,例.空気調節用圧縮機,オイルポンプ (667)
国際特許分類[B60W10/00]に分類される特許
51 - 60 / 623
車両挙動制御装置
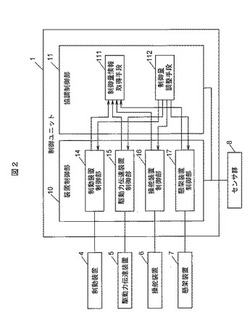
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
ハイブリッド電気自動車の走行制御装置

【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
車両の駆動力制御装置
【課題】 原動機と電動機とを駆動源として備える車両のHEV走行中において、プレシフトするときの所謂駆動力抜けを防止できる車両の駆動力制御装置を提供する。
【解決手段】 駆動力制御装置は、HEV走行中における奇数段から偶数段へのアップシフトのイナーシャ相t3〜t6中に、モータトルクTeを0にし、第1噛合機構SM1を、前段を確立させるギア列の駆動ギアと第1駆動軸との連結を断つニュートラル状態に切り替えた後、次段よりも変速比の小さい変速段を確立させるギア列の駆動ギアと第1駆動軸とを連結させる状態に切り替える。そして、第2クラッチトルクTc2をエンジンのイナーシャトルクが伝達されるようにTQ1からTQ4に上昇させ、0となったモータトルクTe分のトルクを補填する。
(もっと読む)
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
(もっと読む)
ハイブリッド自動車の故障診断装置および方法
【課題】
ハイブリッド自動車の主要部品であるモータ制御器のパワーモジュールで発生する故障を検知するハイブリッド自動車の故障診断装置および方法を提供する。
【解決手段】
パワーモジュールから出力される正弦波形態の各相電流を測定して実効値を計算する第1過程と、第1過程で実効値が計算された各相別電流に対して、「0」を基準として(+)領域と(−)領域に区分し、(+)領域と(−)領域各々の実効値を計算する第2過程と、第2過程で計算された実効値を、第1過程で計算された実効値で除算してその結果を抽出し、「0」を基準として非対称状態であるかを推定する第3過程と、第3過程の推定結果が非対称状態と推定され、故障判定基準時間以上持続すると、故障発生フラグを出力した後、パワーモジュールの動作を中止させる第4過程とを含むことを特徴とする。
(もっと読む)
車両制御装置
【課題】パワーステアリング装置に対する電力供給能力の確保と蓄電装置の大容量化の抑制とを両立でき、かつ制動能力を確保することができる車両制御装置を提供すること。
【解決手段】エンジンと、蓄電装置と、蓄電装置と接続され、電力を消費してエンジンを始動させる始動装置と、蓄電装置と接続され、電力を消費してアシストトルクを発生させるパワーステアリング装置と、エンジンの吸気負圧によって作動するブレーキ倍力装置と、を備え、エンジンを停止して走行しているとき(S5肯定)に、吸気負圧P_brkに基づいて(S4肯定)始動装置によってエンジンを再始動(S6)し、エンジンを再始動するときの吸気負圧の値P_brk_okが、パワーステアリング装置の作動状態に応じて変化する(S1,S2)。
(もっと読む)
車両の駆動力制御装置
【課題】 アップシフト時の変速ショックを抑制すると共に、イナーシャトルクを有効に利用してエネルギー効率を向上できる車両の駆動力制御装置を提供する。
【解決手段】 車両は、エンジンENG、電動機MG、二次電池1、及び検知手段21cを有する駆動力制御装置21を備える。駆動力制御装置21は、アップシフト時のイナーシャ相中に、エンジンENGのイナーシャトルクが駆動輪に伝達されることを阻止するように、検知手段21cで検知されたイナーシャトルクに基づいて電動機MGで発電させて二次電池1に充電する回生を行なうか、又は電動機MGの駆動力を減少させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードとHEV走行モードが遷移する際の駆動トルクの段差を低減可能なハイブリッド車両の制御装置の提供を図る。
【解決手段】エンジンコントローラ11、モータコントローラ12、第1クラッチ2,第2クラッチ4を統合コントローラ15で作動制御して、EV走行モードとHEV走行モードとWSC走行モードを現出する。WSC走行モードの目標駆動トルクを、HEV走行モードの目標駆動トルクに対して、これら走行モードの切り換えによって生じるオフセットトルク分減算して設定することによって、モード遷移時の駆動トルクの段差が低減される。
(もっと読む)
車両の制御装置
【課題】本発明は、音声を車両外部に出力する装置に異常が発生した場合にも、代替手段により音声を発生させ、歩行者等の安全に配慮しつつ車両を走行させることができる車両の制御装置を提供することを目的とする。
【解決手段】 エンジン101とモータMG1、MG2を動力源として備えた車両の制御装置であって、
前記車両の運転状態を検出する運転状態検出手段10と、
該運転状態検出手段により検出した前記運転状態に応じて、前記車両の外部に接近報知音を出力する接近報知音出力手段31、32と、
前記接近報知音出力手段の出力異常を検出する報知音出力異常検出手段51と、
前記接近報知音出力手段が前記接近報知音を出力すべき状態で、前記報知音出力異常検出手段が前記接近報知音出力手段の出力異常を検出したときに、前記エンジンを動作させる駆動を行う駆動制御手段40と、を有することを特徴とする車両の制御装置。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
51 - 60 / 623
[ Back to top ]