
国際特許分類[B60W10/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615)
国際特許分類[B60W10/00]の下位に属する分類
駆動系のクラッチの制御を含むもの (1,598)
推進装置の制御を含むもの (11,419)
変速伝動装置の制御を含むもの (2,573)
差動装置の制御を含むもの (207)
制動装置の制御を含むもの (2,072)
操向装置の制御を含むもの (589)
懸架装置の制御を含むもの (123)
エネルギ貯蔵手段の制御を含むもの (1,731)
燃料電池の制御を含むもの (13)
付属装置の制御を含むもの,例.空気調節用圧縮機,オイルポンプ (667)
国際特許分類[B60W10/00]に分類される特許
71 - 80 / 623
ハイブリッド車両の制御装置
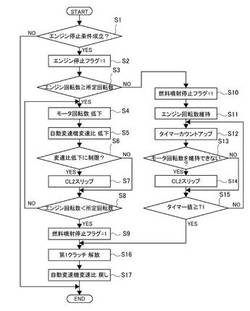
【課題】エンジン停止制御時、差動許容機構を有さない直列接続駆動系でありながら、エンジン再始動時の排気浄化効率の維持と、車速低下の抑制と、燃費の向上と、を併せて達成すること。
【解決手段】駆動系に、エンジンEng、第1クラッチCL1、モータ/ジェネレータMG、第2クラッチCL2、左右タイヤLT,RTを備え、エンジンEngを停止させる際、第1クラッチCL1を締結状態でエンジンEngへの燃料噴射を継続したままでエンジン回転数を低下させ、エンジン回転数N1が所定回転数N2まで低下した段階でエンジンEngへの燃料噴射を停止する。このハイブリッド車両において、エンジン停止制御手段(図4,図5)は、モータ/ジェネレータMGによりエンジン回転数N1を低下させる際、自動変速機CVTをハイ側に変速させ、ハイ側への変速に制限がかかったとき、第2クラッチCL2をスリップ締結状態とする。
(もっと読む)
車両制御装置

【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
車両制御装置及びハイブリッド車両
【課題】環境を考慮して走行モードやエンジン出力を制御する車両制御装置及びハイブリッド車両を得る。
【解決手段】現在位置を検出する位置検出部21と、地図データを記憶する地図データベース22と、地図データ内の特定区間の閾値を記憶する記憶部25と、特定区間の規模を判定する特定区間規模判定部24と、特定区間規模判定部24からの情報と記憶部25からの閾値を基に、特定区間の規模が特定区間の閾値より大きい場合に、車両の走行モードとエンジン出力を制御する駆動制御部17に車両を電動機走行モード、エンジン出力低下、及びエンジン出力停止の少なくともいずれかとする制御信号を出力する車両制御部28とを備えた。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時のショックの発生等を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、シリーズ式走行モードとシリーズパラレル式走行モードとの間で走行モードを切り替え可能なハイブリッド車両に搭載される。ハイブリッド車両の制御装置は、エンジンと、制御手段とを備える。制御手段は、冷間始動時では、シリーズ式走行モードによりエンジンを始動させる。
(もっと読む)
車両用制御装置
【課題】車両が、想定されていなかった走行場に遭遇したときに、その走行場に対応した新たな制御アルゴリズムを自律的に創発することができる車両用制御装置を提供する。
【解決手段】本発明は、ドライバ状態、車外環境状態及び車両状態を検出する検出部10と、車両が遭遇している走行場を推定する推定部20と、過去の経験に基づく既知の走行場と車両の制御アルゴリズムとを対応付けて記憶した第1記憶部30と、推定走行場が想定内であるか、想定外の走行場であるかを判定する判定部40と、推定走行場が想定外である場合に、推定走行場に対応する制御アルゴリズムを創発する創発部50と、推定走行場が想定内である場合に、第1記憶部30から獲得した推定走行場に対応する制御アルゴリズムを車両の制御パラメータに変換し、推定走行場が想定外の走行場である場合に、創発された制御アルゴリズムを車両の制御パラメータに変換する変換手段60とを有する。
(もっと読む)
電気自動車の電気的負荷を充電するためのアッセンブリ及び方法
【課題】ハイブリッド自動車(HEV)の電気推進システムの電気的負荷に対し、予備充電低電流状態、定常状態高電流充電状態、及びアンコネクト状態を提供するため、充電アッセンブリ及び充電方法を提供する。
【解決手段】充電アッセンブリは、プラス側接触器デバイス、マイナス側接触器デバイス、及び無接点接触器デバイス手段を含む。電気的負荷の予備充電速度を、無接点接触器デバイス手段が受け取ったパルス幅変調(PWM)信号によって効果的に制御してもよい。電流のみを搬送するプラス側接触器又はマイナス側接触器は、充電アッセンブリの作動中にプラス側接触器及びマイナス側接触器の接点でアーク放電が発生しないように、無接点接触器デバイス手段とともに作動するように形成されている。
(もっと読む)
制御装置、車両、制御方法、およびプログラム
【課題】インバータ制御における不必要な電力消費を低減させること。
【解決手段】エンジン10と電動機13のいずれか一方または双方によって走行し、電動機13に電源を供給するバッテリ15を有し、バッテリ15と電動機13との間にバッテリ15と電動機13との間で受け渡される電力を制御するインバータ14を有するハイブリッド自動車1において、バッテリ15から電動機13への電源供給を必要としない第一の条件と、電動機13からバッテリ15へ供給される電圧の調整を必要としない第二の条件とを共に満足するか否かを判定し、第一の条件と第二の条件とを共に満足すると判定した場合、インバータ14の制御を休止させるハイブリッドECU18を有するハイブリッド自動車1を構成する。
(もっと読む)
71 - 80 / 623
[ Back to top ]