
国際特許分類[B62D65/18]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 自動車またはトレーラーの設計,製造,例.組立て,解体,または構造的な変更で他に分類されないもの (881) | 自動車またはトレーラーの製造ラインに特に適合する輸送,搬送または牽引システム (207)
国際特許分類[B62D65/18]に分類される特許
31 - 40 / 207
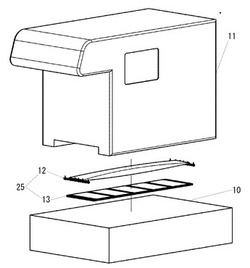
コンテナの移動装置
【課題】
貨物自動車へのコンテナの乗せ降ろしを行い、その他の機能(キャンピングカーや移動販売作業車等の機能)を搬送自動車にを付加する場合のコンテナの移動作業の簡易化。
【解決手段】
膨張バッグ12とローラー台車13を組み合わせたジャッキローラー25をコンテナの床に設置することにより解決する。コンテナ11の内部空間を広くするために、ジャッキローラ25の厚みを薄くすることを目的に、膨張バッグ12とローラー台車13のローラーが対面することを特徴とする。膨張バッグと外気の圧力差0.5メガパスカル以下での使用とし扱いやすさを特徴とする。
(もっと読む)
多種混合組立ラインの制御システム

【課題】作業ミスが少なく生産性の高い多種混合組立てラインの制御システムを提供する。
【解決手段】本発明にかかる多種混合組立てラインの制御システム10は、車種に関する生産情報を送信するライン制御部1と、生産ライン2上にあるパレット3の情報を取得して送信するライン設備動作制御部4と、車種別の作業工程データが設定可能であり、ライン制御部から送信された生産情報とライン設備動作制御部から送信されたパレットの情報と作業工程データに基づいてパレット毎の作業工程ファイル5を作成するラインコントローラ6と、ラインコントローラで作成された作業工程ファイル5に基づいて各工程での作業指示と各作業工程で用いる機器8を制御する工程制御部7とを有している。
(もっと読む)
車両輪荷重調整装置
【課題】タイヤの性能テストにおいて、非乗車状態での車両の左右の輪荷重バランスを補正し、正しい輪荷重バランスにすることでタイヤの性能を正確に測定できるようにする車両輪荷重調整装置を提供する。
【解決手段】非乗車状態での車両の輪荷重のバランスを調整する車両輪荷重調整装置が、車両の複数のタイヤ内に空気を供給する空気供給手段と、空気供給手段から複数のタイヤへの空気供給量を制御する供給制御弁と、タイヤから大気への空気排出量を制御する排出制御弁と、各タイヤの輪荷重値を個別に測定する輪荷重測定手段と、輪荷重測定手段から入力した各タイヤの輪荷重値に基づいて算出した車両における一方の対角輪の輪荷重値の合計値と他方の対角輪の輪荷重値の合計値との差を算出し、当該差を無くすように供給制御弁と排出制御弁とを制御する制御装置とを備えるように構成した。
(もっと読む)
コンベア装置
【課題】コンベア上での組付作業やコンベア上のパレットへの部品搭載作業を容易化する。
【解決手段】コンベア2の支持部(支持レール33及び支持ローラ34)をパレット1に対して幅方向一方側に偏在させ、支持部の幅方向他方側に形成される作業空間Qをパレット1の搬送経路内に侵出させる。また、支持部で支持されたパレット1の幅方向一方側の端部(突出片12)を上方から押さえる押さえ部(押さえローラ51)を設ける。
(もっと読む)
ワーク搬送設備
【課題】自動車ボディーなどを前後縦向きに搬送する経路と左右横向きに搬送する経路とが組み合わされたワーク搬送設備を提供する。
【解決手段】ワーク搬送用走行体1は、長さ方向が走行方向と平行な向きのワークWの長さ方向中央部を支持するワーク支持台車2と、このワーク支持台車2の走行方向前後に隣接して前記ワークWの長さ方向両端部下側に位置する2台の補助台車3,4とから構成され、ワーク支持台車2には、ワークWを高位置で支持する起立姿勢と、ワークWの下側でワーク支持台車2上に倒伏した折り畳み姿勢とに切り換え自在なワーク高位置支持手段5が設けられ、2台の前記補助台車3,4には、折り畳み姿勢の前記ワーク高位置支持手段5よりも高い高さでワークWの長さ方向前後2箇所を当該ワークWの下側で各別に支持するワーク低位置支持手段16,17が設けられた構成。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
自動搬送システム
【課題】本発明は、確実な自動連結と連結状態検出,連結部材の収納,重量搬送のための頑強な連結部の実現を可能とする自動搬送システムを提供する。
【解決手段】自動搬送車は後部に回転部を設け、回転部に回転部材を設ける。台車は、前部に固定部材を設ける。回転部材の自重もしくは回転部の駆動により、回転部材から固定部材へ接触力を加える。回転部材と固定部材の備える凹凸形状により、回転部材と固定部材の相対可動領域が制限された連結状態1と、連結状態1よりも相対可動領域が制限された連結状態2を作る。回転部材と固定部材の備える凹凸形状は、前記の接触力が加えられた状態で、回転部材もしくは固定部材を移動させることにより、連結状態1から連結状態2へと誘導し、回転部材もしくは固定部材を接触力の方向へ移動することによって連結状態1から連結状態2へと遷移する。
(もっと読む)
溶接組付方法
【課題】溶接を施すワークの種類が多岐にわたる製造ラインでの治具の切替を容易にし、低コストで短期間に設定変更ができる生産設備を提供する。
【解決手段】溶接組付ライン100には、台車106の経路107が設定されている。台車106には、治具110が着脱自在に載置される。識別部150は、治具110にセットされたワークの種類を特定する。台車106が進行した後、リフタ112は、ワークがセットされている治具110を持ち上げて保持する。溶接ロボット111は、リフタ112に保持された治具110上のワークに対して、識別部150によって特定されたワークの種類に応じた溶接を施す。溶接後、解放装置113は、ワークを治具110から解放する。マテリアルハンドリングロボット114は、この解放されたワークを取り出す。
(もっと読む)
搬送装置
【課題】簡単な構造でコンパクトな汎用性の高い搬送装置を提供する。
【解決手段】搬送装置1は、支持手段21に支持されたトレー11の下方位置で、無端の駆動チェーン33をトレー11の循環経路に沿って走行させて、チェーン案内手段32Bによって直進動作の開始位置から終了位置まで案内し、直進動作の終了位置で駆動チェーン33の走行方向を列方向から横方向に変更し、横進動作の開始位置から終了位置まで案内し、横進動作の終了位置で駆動チェーンの走行方向を横方向から列方向に変更する。そして、トレーブロックへの押し当てが直進動作の開始位置から終了位置までの間と横進動作の開始位置から終了位置までの間で交互に行われるように複数のローラアタッチ34を駆動チェーン33に所定のピッチで設ける。
(もっと読む)
搬送台車、搬送ライン及び搬送方法
【課題】複数のポストに対してベース部品を位置決めを行って載置したまま複数の組付作業工程を移動させることができ、搬送台車自体及び搬送台車を使用する搬送ラインの構造を極めて簡単にできる搬送台車、搬送ライン及び搬送方法を提供すること。
【解決手段】搬送台車3は、ベース部品8を載置するための複数のポスト44を立設してなるベース台車部4と、複数のポスト44に対して昇降可能に支持されると共に作業者の足場を形成する作業台車部5とを備えている。搬送台車3は、ベース台車部4が床下ピット21との間で転がり接触すると共に作業台車部5が床面直下22との間で転がり接触して両台車部4、5を一体的に移動させる第1移動状態301と、作業台車部5を上側に載置した状態でベース台車部4が床面直下22との間で転がり接触して両台車部4、5を一体的に移動させる第2移動状態302とを切り替えて形成する。
(もっと読む)
31 - 40 / 207
[ Back to top ]