
国際特許分類[B62D65/18]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 自動車またはトレーラーの設計,製造,例.組立て,解体,または構造的な変更で他に分類されないもの (881) | 自動車またはトレーラーの製造ラインに特に適合する輸送,搬送または牽引システム (207)
国際特許分類[B62D65/18]に分類される特許
81 - 90 / 207
搬送設備
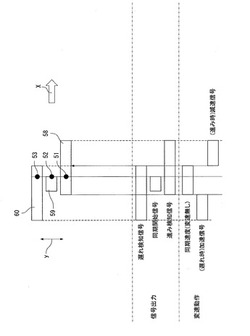
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
車体に対する足回り部品の同期搬送装置及び同期搬送方法

【課題】車体に対する足回り部品の同期搬送装置及び同期搬送方法において、当該装置の設置コスト及び運転コストを抑え、かつ車種変更への対応による煩雑さ及びコスト高を抑える。
【解決手段】フリクションコンベア31の主ライン部28aの始点28bの上流側で搬送装置1を停止させた後、該搬送装置1をフロア側チェーンコンベア24の係合部に係合させるタイミングで主ライン部28aに送り出すと共に、搬送装置1が主ライン部28aの終点28cまで走行した後、該搬送装置1を前記係合部への係合を解除するタイミングでフリクションコンベア31のリターン部28dに導く。
(もっと読む)
ワーク移動用装置
【課題】加工ライン、組立ラインにおける異なる床面高さにも対応でき、作業者の大幅削減を可能とし、安全に搬入搬出が行えて、不良品発生時などの不定常作業の標準化が可能なワーク移動装置及び移動方法の提案。
【解決手段】搬送対象物(E)を載置するフロワ部分(7)と、搬送対象物(E)を専用台車(AGV)からフロワ部分(7)まで移動し或いはフロワ部分(7)から専用台車(AGV)まで移動する機能を有する移動機構(8)と、前記フロワ部分(7)を上下させる機能を有するアウトリガ(6)と、制御装置(3)とを有している。
(もっと読む)
自動車などの組立て用搬送装置
【課題】車体にエンジンなどの組付け部品を車体下側から組み付ける部品組付け作業を行える搬送装置の大幅なコストダウンを図る。
【解決手段】車体Bを搬送する搬送台車1上に車体支持手段12が設けられ、この支持手段12で所定高さに支持された車体Bに対する下側からの部品組付け作業が搬送台車1上で行えるように構成された搬送装置において、搬送台車1の走行経路中のエンジン組付け作業区間の下側に、当該区間の始端位置6aから終端位置6bまで搬送台車1と同期して走行可能な同期走行台車22が設けられ、この同期走行台車22上に、搬送台車1の床面に設けられた開口部71を経由して昇降する昇降台55を備えたリフター31が搭載され、台車床面上に乗り入れて定停止位置で停止したエンジン搬入台車3のエンジンEを支持する昇降テーブル77が、同期走行台車22側のリフター31の昇降台55により所定高さまで持ち上げられる構成。
(もっと読む)
ガラス取り付けシステム
【課題】ガラスの取り付け作業にかかる時間を短縮でき、かつ、設備を小型化してコストを低減できるガラス取り付けシステムを提供すること。
【解決手段】ガラス取り付けシステム1は、フロントガラス11またはリヤガラス12とクォータガラス13とを搬送路21に沿って搬送する搬送装置22と、搬送路21に設けられた一対のガラス取り付けロボット27、28と、を備える。一対の取り付けロボット27、28は、フロントガラス11またはリヤガラス12を取り付ける大型ガラス取り付けロボット28と、クォータガラス13を取り付ける小型ガラス取り付けロボット27と、で構成される。搬送装置22は、フロントガラス11またはリヤガラス12とクォータガラス13とを1組として、この1組のガラスが同時に大型ガラス取り付けロボット28および小型ガラス取り付けロボット27に供給されるように、間欠的に駆動する。
(もっと読む)
組み立てシステム
【課題】1つのラインで異なる種類の自動車部品を組み立てつつ、設備スペースを削減できる組み立てシステムを提供すること。
【解決手段】組立てシステム1は、本体および部品でそれぞれ構成される複数種類の自動車部品を組み立てる。この組み立てシステム1は、前記複数種類の自動車部品のそれぞれの本体および部品が載置されて走行する複数の走行台車21〜24と、複数種類の自動車部品のそれぞれの部品が載置された複数の部品用パレット30と、部品用パレット30を搬送するベルトコンベア40と、作業者が配置されるメインライン50と、このメインライン50からオフセットされて、ロボットRB1〜RB5が配置されるバイパスライン80と、これらを制御する制御装置60と、を備える。制御装置60は、メインライン50およびバイパスライン80のうち少なくとも1つにより走行台車21〜24の搬送経路を設定する。
(もっと読む)
コンベヤ上への車両移載装置
【課題】前後車輪間の距離が一定でない各種車両をコンベヤ上へ移載し得る構造簡単な移載装置を提供する。
【解決手段】昇降体5上の前側車輪支持手段6には、前輪Wfを搬送方向に関して定位置で支持する閉じ姿勢と当該前輪Wfの搬送方向への脱出を許す開放姿勢との間で水平に開閉自在な前後一対の車輪支持アーム29a,29bが設けられ、昇降体5上の後ろ側車輪支持手段7には、搬送方向に関する位置決めをしないで後輪Wrを支持する車輪支持板38が、水平姿勢と搬送方向へ前下がりに傾斜する傾斜姿勢とに切換え自在に設けられ、前側車輪支持手段6の閉じ姿勢にある車輪支持アーム29a,29bと後ろ側車輪支持手段7の水平姿勢にある車輪支持板38とで車両Cを支持した昇降体5が少なくともコンベヤ1上に車両Cを移載する下降限位置にあるとき、後ろ側車輪支持手段7の車輪支持板38を傾斜姿勢とする姿勢切換え手段40が設けられた構成。
(もっと読む)
組み立てシステム
【課題】1つのラインで異なる種類の自動車部品を組み立てつつ、設備スペースを削減できる組み立てシステムを提供すること。
【解決手段】組立てシステム1は、本体と、この本体に取り付けられる部品と、でそれぞれ構成される複数種類の自動車部品を組み立てる。この組み立てシステム1は、作業者が配置される作業者エリア50と、自動車部品それぞれの本体が載置されて作業者エリア50に沿って走行する複数の走行台車21〜24と、自動車部品それぞれに取り付けられる部品が載置された部品用パレット30と、この部品用パレット30を作業者エリア50に沿って搬送するベルトコンベア40と、これらを制御する制御装置60と、を備える。制御装置60は、走行台車21〜24およびベルトコンベア40を駆動して、走行台車21〜24および部品用パレット30を同期して搬送する。
(もっと読む)
オートリサイクルシステム
【課題】 使用済み自動車を効率的に分別解体し、再利用可能な回収部品を効率的に回収し、最終処理の段階で排出されるシュレッダーダスト(ASR)発生量の低減を図るオートリサイクルシステムを提供し、コスト削減と環境保護を両立すること。
【解決手段】 使用済み自動車を解体処理するオートリサイクルシステムにおいて、エアコン中のフロンを回収し、エアバッグを電気操作して強制的に爆発膨張させた後、そのエアバッグの生地素材を回収する事前準備工程と、小物部品や部材などの回収部品を取り外して回収すると共に車体に残されたハーネスを分離可能となるように切断する前処理解体工程と、燃料・オイルをドレンコックより回収する燃料・オイル回収工程と、ニブラにより車体を大きく解体するニブラ処理工程と、シュレッダーにより車体を細かく破砕して廃棄物処理をする最終処理工程とを順序だてて行うことを特徴とする。
(もっと読む)
車両搬送設備
【課題】搬送ハンガーの車両を積載している時と車両を積載していない時におけるストレージピッチを可変させ、循環軌道の機長を短くする。
【解決手段】車両1を加工処理するための循環軌道2に吊り下げられている搬送ハンガー3は、進行方向前側に設置された前部トロリ31及び前部トロリ31の進行方向前側に位置する駆動用トロリ35とを連結する前部ロードバー34と、後部トロリ32及び後部トロリ32の進行方向後側に位置する駆動停止用トロリ37とを連結する後部ロードバー36とを備え、前部ロードバー34及び後部ロードバー36は当該ロードバーを伸縮可能な伸縮機構5が組み込まれ、伸縮機構5は搬送ハンガー3を停止させた状態で、第1の駆動装置で収縮され第2の駆動装置で延伸される。
(もっと読む)
81 - 90 / 207
[ Back to top ]