
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
111 - 112 / 112
水中航走装置
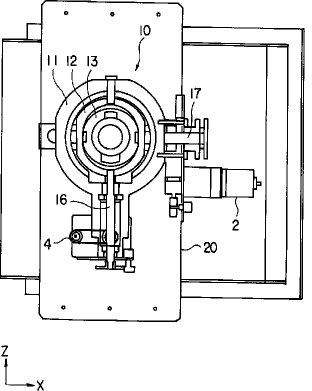
【課題】 ホバリングや旋回などの位置及び姿勢の細かな制御を実現することが可能な操縦装置を備えた水中航走装置を提供する。
【解決手段】 胸鰭1はジンバル機構10の中央に取り付けられる。ジンバル機構10は、3個のリング11、12、13、第一回転軸16、これに直交する第二回転軸17などから構成される。サーボモータ4は胸鰭1に第一回転軸16のまわりで前後方向に往復旋回するリード・ラグ運動を与える。サーボモータ2は胸鰭1に第二回転軸17のまわりで上下方向に往復旋回するフラッピング運動を与える。サーボモータ3は胸鰭1に第一回転軸16及び第二回転軸17に対して直交する軸の回りで往復回転するフェザリング運動を与える。リード・ラグ運動とフェザリング運動の位相差、及びリードラグ運動とフラッピング運動の位相差を同時に調整することによって、水中航走装置の移動及び姿勢の制御を行う。
(もっと読む)
水中作業用マニピュレータの案内装置

【目的】 水中作業用マニピュレータを遠隔操作で確実に目的位置に誘導することができる案内装置を提供する。
【構成】 ピット1外の制御盤とは浮体4付きのケーブル5で接続されて水面航行可能な母船3と、ピット1上部に設けられた気中カメラ6と、母船3下部に設けられた第1水中カメラ7aと、同母船3とは浮体11付きの第1水中ケーブル8aで接続されたバラスト機構付きの中間フロート9と、この中間フロート9に第2水中ケーブル8bで接続されたマニピュレータ10と、前記中間フロート9に設けられた第2水中カメラ7bとを備え、気中カメラ6で母船3を、第1水中カメラ7aで中間フロート9を、第2水中カメラ7bでマニピュレータ10をそれぞれ監視できるようにした。
(もっと読む)
111 - 112 / 112
[ Back to top ]