
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
11 - 20 / 112
水中航走体揚収方法および水中航走体揚収システム
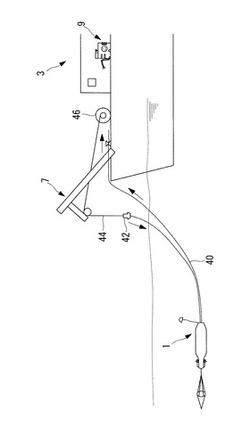
【課題】水中航走体の引上時の重量を可及的に増加させずに短時間にて揚収できる水中航走体揚収方法を提供する。
【解決手段】水面下にて、自走するRODD9によって、ガイド索40を掛け回した取付金物を水中航走体1に固定し、ガイド索40を繰り出しながらRODD9を母船3へと航行させ、RODD9からガイド索40を母船3へと受け渡し、母船3に受け渡されたガイド索40の一端に引上索44の先端を取り付け、ガイド索40の他端を母船3側に引き込むことによって、ガイド索40の一端に取り付けた引上索44の先端を水中航走体1へと導き、水中航走体1に固定した取付金物に対して引上索44の先端を固定し、引上索44を母船3側に引き込むことによって、水中航走体1を取付金物とともに母船3側に引き上げる。
(もっと読む)
水中航走体用船上管制装置の表示方法

【課題】 水中航走体の航走状態の把握を容易にする。
【解決手段】 船上管制装置のディスプレイ1に、水平面投影像表示部2、X軸方向鉛直面投影像表示部3及びY軸方向鉛直面投影像表示部4を備える。水平面投影像表示部2には、表示対象領域内に存在する表示対象となる水中航走体AUVとその軌跡11、母船MV、ウェイポイントP1,P2,P3,P4の三次元空間内での位置を水平面に投影した像の位置を表示させる。X軸方向鉛直面投影像表示部3とY軸方向鉛直面投影像表示部4には、各表示対象の三次元空間内での位置を、水平面投影像表示部2における横方向であるX軸と、縦方向であるY軸にそれぞれ沿う鉛直面に投影した像の位置を表示する。水中航走体AUVとその軌跡11、母船MV、ウェイポイントP1,P2,P3,P4の三次元空間での相対的な位置を、三面図と同様に表示して立体的に捉えることができるようにさせる。
(もっと読む)
深度信号生成装置
【課題】分解能の粗い深度センサを用いた場合であっても、精度良くかつ安定的な制御深度信号を生成することができる深度信号生成装置を提供する。
【解決手段】潜水船1に設けられた深度センサ8の検出深度Z2に基づいて、目標深度Z0となるように、潜水船1の深さ方向への移動を制御する制御深度信号ΔZaを生成可能な深度信号生成装置10であって、垂直スラスタ6のスラスタ回転数N0に基づいて、所定の推定深度計算モデルから、推定深度Z1を算出する推定深度算出部15と、算出した推定深度Z1と目標深度Z0との差分を制御深度信号ΔZaとして算出する深度信号算出部16と、算出した推定深度Z1と検出深度Z2との差分を推定深度誤差ΔZbとして算出する推定深度誤差算出部18と、推定深度算出部15に入力されるスラスタ回転数N0を、推定深度誤差ΔZbに基づいて補正するスラスタ回転数補正部20と、を備えた。
(もっと読む)
水中航走体の自動動作確認方法及び装置
【課題】水中航走体の動作確認に要する時間、手間、人手を削減する自動動作確認方法および装置を提供する。
【解決手段】アクチュエータ動作確認ステップSaにて、水中航走体の各スラスタと各舵に個別の動作指令を順次与えて、各スラスタと各舵に生じる動作と、対応するスラスタ回転数センサ、舵角センサの検出結果との整合性を確認する。次いで、水面動作確認ステップSbにて、各スラスタや各舵の動作と対応するセンサの検出結果との整合性がすべて確認された水中航走体を水面に浮かべて配置し、各スラスタを順に動作させて、そのときに生じる水中航走体の動作と、水中航走体に搭載してあるINS(慣性航法装置)とDVL(ドップラー式対水速度計)とGPS装置による検出結果との整合性を確認することで、各スラスタと対応するスラスタ回転数センサの同時接続間違いがなく、更に、水中航走体に搭載されたINSとDVLの向きが正しいことを確認させる。
(もっと読む)
フロート装置
【課題】駆動モータの消費電力を低減することで、船上からの電力供給を不必要とし、また小型の電池であっても電池交換の頻度を減らすこと。
【解決手段】浮力を有するフロート筐体11と、フロート筐体11に取り付けられ、一端が外部に開口したシリンダ31と、フロート筐体11内に設けられたモータ40と、シリンダ31内をモータ40の作動に応じて往復動するプランジャ60と、プランジャ60に往復動方向に沿って取り付けられ、プランジャ60がフロート筐体11側に移動する際に抗するエアスプリング50とを備えている。
(もっと読む)
水中環境無人調査船
【技術課題】 河川や湖において、危険な場所でも土砂の採集及び採水できる環境調査船を提供する。
【解決手段】 ラジコンボート1上にクレーン3とウインチ8・10を取り付け、ウインチ8で昇降ワイヤー9の先端に採集器17又は採水器29又は水中カメラ40を取り付ける。採集器17及び採水器29には船上のウインチ10操作で引かれる開閉ワイヤー11により開閉する栓体25又はボールバルブ36、37を取り付け、陸上から船上の制御器2を経由して前記栓体25又はボールバルブ36、37をリモコン操作することにより水中での土砂の採集あるいは採水を行う。このようにラジコンボート1を用いて環境調査を行うため、危険な場所まで入り込んで調査ができると共に無人のため調査コストの削減ができる。
(もっと読む)
海洋船を進水・回収するための装置、及び関連する進水・回収方法
【課題】波のうねりの中でも潜水船が損傷することなくケージに適切に侵入できる海洋船の浸水・回収装置を提供する。
【解決手段】進水・回収装置1は、海上台船に肯定されるようになっているハンドリング構造体2と、ケージ3を構造体2に係止する手段29とを備え、ケージ3は、構造体2に、引き上げケーブル12,13によって、車輪10a,10b,11a,11b及びアクチュエータ10c,11cのシステムを介して接続されている。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
繊維強化複合材を用いた浮力体とそれを備えた水中潜水機
【課題】繊維強化複合材を用いて、小さな体積で大きな浮力を得ることができる浮力体を提供する。
【解決手段】所定の深度まで潜水する海中探査機に装備する浮力体20を、中空状の気密内容器23と、この気密内容器23の外面を覆う繊維強化複合材外殻24とで中空浮力体容器25を形成し、この中空浮力体容器25の内部空間30に、気体で潜水圧以上の内圧を掛けて形成する。これにより、海中探査機における浮力体20を小型化して、他の機器等を含む全体の装備効率を向上させる。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】無人の水中航走体による水中範囲の調査に対する手間を減少させる。
【解決手段】無人の水中航走体1が、制御装置3によって、設定可能な制御情報に基づき制御可能である。無人の水中航走体1が、自律運転モードまたは遠隔操舵運転モードで選択的に制御可能であり、自律運転モードでは、制御装置3に、記憶素子13からの事前に求められた内的な制御情報が設定可能であり、遠隔操舵運転モードでは、制御装置3に、水中航走体1の通信装置11を介して外的な制御情報が設定可能である。
(もっと読む)
11 - 20 / 112
[ Back to top ]