
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
81 - 90 / 112
有線式遠隔操縦型水中遊泳ビークル

【課題】水中遊泳型ビークルに接続された信号ケーブルの剛性によるそのビークルへ加わる外力を考慮しながらそのビークルの浮力を中性浮力に制御することが課題である。
【解決手段】原子炉圧力容器内の水中を各種スラスタ41,51a,51bによる推進装置で遊泳するビークル10と、ビークル10に連結された信号ケーブル32と、信号ケーブル32によってビークル10に垂直方向に加わる力を外力センサ33で検出する外力を計測する計測手段と、電磁バルブ64a,64bを開閉することにより、浮力体70a,70bに高圧ガスポンベ60から高圧ガスを注入したり浮力体70a,70b内のガスを排気管68から排気したりすることでビークル10の浮力を調整する浮力調整手段とを備えた有線式で遠隔操縦される水中遊泳ビークル。
(もっと読む)
深海設置船
設置船は、鉛直方向に約3メートル離間された上方デッキおよび下方デッキ(40,50)を有し、下方デッキの大部分は上方デッキによって覆われるが、下方デッキの後方部分(60)は覆われていない。上方デッキは主に格納のために使用され、下方デッキは、下方デッキの後部においてウインチ(86)から船尾ローラ(84)に通される錨チェーン、ワイヤ、ロープ等の設置に用いられるものであり、したがって設置中にデッキに沿って移動するチェーン、ワイヤ、ロープ等による危険な状態は、下方デッキに限定される。船の一方側に位置するメインクレーン(72)は、覆われていない下方デッキ前方部分(60)のすべての部分および上方デッキの大部分にクレーンが到達することができる位置において、上方デッキの後方端の前方に位置する。  (もっと読む)
(もっと読む)
自律型無人潜水機およびその水中航行方法

【課題】水中ステーション位置の測位精度を向上させて自動ドッキングを可能とする。
【解決手段】仮想の固定座標上における自己位置を慣性航法により検出可能な慣性航法装置3と、水中ステーション20に設置されたトランスポンダ23の自己位置からの相対距離および方位を音響測位により検出可能な音響測位装置4と、慣性航法装置3で把握される固定座標上の自己位置に対して、音響測位装置4で検出されるトランスポンダ23の相対距離および方位を組み合わせることで、トランスポンダ23の固定座標上における位置を算出する自律航行制御装置5とを備えている。
(もっと読む)
波力
【課題】
【解決手段】波力式のウォータビークルが、表面のフロートと、沈むスウィマと、フロートとスウィマを連結する連係具とを具えており、スウィマは、波の動作により上下に移動する。スウィマは、スウィマが上下に移動するときに水と相互作用し、ビークルを前方に進ませる力を生成する1以上のフィンを具えている。人を必要としないビークルは、通信及び制御装置を具えることができ、これにより、ビークルは送信された信号により案内されるコースを進むことができ、ビークル上のセンサからのデータを記録又は送信することができる。
(もっと読む)
水中航走体の航路制御方法
【課題】水中航走体の姿勢を制御する水平スラスタおよび垂直スラスタの動力の省エネルギー化を図ることができる水中航走体の航路制御方法を提供すること。
【解決手段】機体2の左右方向に延びる水平軸線に沿って配置された水平スラスタ7を備えるとともに、予め定められた経路の上を航走するた水中航走体1であって、潮流の影響を受けて、針路と機体方位との間に差が生じ、この針路と機体方位とのなす角度が所定角度以下の場合には、前記水平スラスタが作動しないように構成されている。
(もっと読む)
水中航走体
【課題】水中航走体の動力を効率よく使用することができる水中航走体を提供すること。
【解決手段】機体2を浮上または潜行させるのに使用される水平舵4と、前記機体2を左回頭または右回頭させるのに使用される垂直舵5とを備えた水中航走体1であって、前記水平舵4が、重心Gよりも前方側に位置する部分から、前記機体2の左右方向に延びる水平軸線に沿って設けられている。
(もっと読む)
無人の水中航走体の降下およびトラッキングのための装置
水中航走体(10)の降下およびトラッキングのための装置は、保持ケーブル(17)の端部に配置されたキャリア(12)と、このキャリア(12)に配置された、水中航走体(10)を切り離すために制御可能な保持部材(13)を用いて水中航走体(10)を収容するための保持装置(13)と、水中に投入された水中航走体(10)の音響的な位置決定のためにキャリア(12)に配置されたトラッキング装置(25)とを有している。小さなプラットフォームでの取扱いに適していて、トラッキング装置(25)の音響的に妨害されない作業を保証する軽量でコンパクトな降下装置を提供するために、トラッキング装置(25)は長手方向に延ばされて形成されたキャリア(12)の所定の端部に配置されていて、キャリア(12)はその中央の長手方向領域において保持ケーブル(17)に枢着されている。旋回装置が、保持装置(13)からの水中航走体(10)の切離し後に、降下位置からトラッキング位置にトラッキング装置(25)を備えたキャリア(12)を旋回させる。  (もっと読む)
(もっと読む)
位置姿勢制御装置及び位置姿勢制御方法
【課題】小回りの効く浮遊体の位置姿勢制御を可能にするとともに、一方向だけでなくその他の種々の方向についても同一姿勢を維持しながら移動する位置姿勢制御を可能にする。
【解決手段】それぞれ推力を発生させる6つの推力発生器14を備え、推力発生器14の何れもが、異なる方向に推力を発生させる設定とされている。各推力発生器14は、推力方向に延びる仮想直線30が隣の推力発生器14の推力方向に延びる仮想直線30と仮想軸40に垂直な2つの仮想平面上で交差するように位置決めされるとともに、前記一方の仮想平面上における仮想直線30の交点が仮想軸40上に重心位置のある正三角形の各頂点位置となり、かつ前記他方の仮想平面上における仮想直線30の交点が仮想軸40上に重心位置のある正三角形の各頂点位置となるように位置決めされている。
(もっと読む)
潜水ビークル
船体軸を画定するとともに船体軸に沿って見た時に略環状を呈する外側船体を有する潜水ビークルであり、環状体の内部は、ビークルが液体に潜水する時に液体がダクトを満たすように、両端部で開口したダクトを画定する。ビークルはさらに、船体軸を中心にビークルを転回させるための手段を含む。浮力制御システムが設けられ、外側船体は船体軸に対して後傾している。ビークルを出動および使用する様々な方法が記載される。 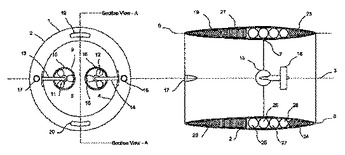 (もっと読む)
(もっと読む)
船尾揚収船
【課題】 船尾から舟艇を揚収するスリップウェー方式またはドック方式とする場合、トランサム部に設けられた観音開きの扉体を、航走による水流の抵抗を受けて全開にできない状況に鑑みて、円滑に全開させることができる扉体を備えた船尾揚収船を提供する。
【解決手段】 母船1の船尾に設けられた観音開きの扉体4の一対のヒンジ軸4aを、上方が下方よりの軸間距離が小さくなるようハ字形の位置関係となるよう設定する。これにより、扉体4を開放する際には、該扉体4は斜め上方に回動することになり、開放時に該扉体4の下端部が母船1の船底から突出することがない。このため、船底から後方に流れる水の影響を極力受けることがなく、円滑な開放を行え、航走の抵抗となることがないので船速が減じられることがない。
(もっと読む)
81 - 90 / 112
[ Back to top ]