
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
101 - 110 / 112
潜水機の通信装置及び方法
【課題】 潜水機と母船等との間の通信に、音波よりも伝搬速度が速い電磁場(電磁波)を用いることにより、リアルタイムな潜水機の制御等を可能とし、しかも雑音等の影響が少ない潜水機の通信装置及び方法を提供する。
【解決手段】 水中の潜水機10と陸上又は水上との間で、無線通信を行うための通信装置であって、伝送しようとするデータを圧縮し、この圧縮データを低周波の電磁場により送受信する。
(もっと読む)
誘導制御装置、誘導制御システム、母船、誘導制御方法及びプログラム

【課題】母船から制御され目標へ向かって運行する航走体の母船での操作を、目標を見失うことなく容易に行なう。
【解決手段】母船1から送出され、外部から制御される航走体2と、航走体2を制御する誘導制御装置4とを具備し、航走体2は、航走体2の向いている方位としての方位情報と、航走体2の対地速度としての速度情報と、目標3の航走体2に対する相対位置としての対象相対位置情報とを計測して誘導制御装置4へ出力する。誘導制御装置4は、方位情報、速度情報、対象相対位置情報及び航走体2位置としての航走体位置情報に基づいて、航走体2と目標3との相対距離としての制御相対距離を算出する。誘導制御装置4は、制御相対距離が、予め設定された基準距離以下の場合、航走体2を停止させるように航走体2を制御し、基準距離以下の場合、予め設定した作業を行なわせるように航走体2を制御する。
(もっと読む)
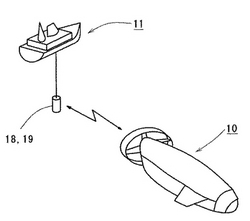
潜水船の追跡のための装置及び方法
潜水船(11)の追跡のための装置及び方法において、プラットホーム(13)は、潜水船(11)の現在位置の規定のための追跡装置(15)と一緒に水中内に投入され、かつ潜水位置で三次元的に安定にされるようになっている。このために、プラットホーム(13)は、水平方向若しくは垂直方向に作用する操縦駆動部(18,19)を有しており、該操縦駆動部は制御回路内に配置されている。  (もっと読む)
(もっと読む)
水中生物処理装置及び処理方法
【課題】 アオコのような水生生物の個々の発生状況に応じた処理を行って、その増殖を効率良く防止することができるような水中生物処理装置及び処理方法を提供する。
【解決手段】 この水中生物処理装置は、船体10と、船体10を水域において走行させる推進手段66と、水中に浸漬するように設けられた放電処理器14と、放電処理器を水中において昇降可能に支持する昇降支持機構16とを有することを特徴とする。これにより、船体を水域において走行させながら、放電処理器14を昇降支持機構16によって昇降させ、最適な深さにおいて放電させて水中生物の処理を行うことができる。
(もっと読む)
メタンハイドレート採鉱用ロボット
【課題】 メタンハイドレートの採鉱方法として現在考えられている掘削リグを用いる方法が有する数多くの問題点を悉く解決することが可能であって、メタンハイドレートを効率良く安定して採鉱することができるメタンハイドレート採鉱用ロボットを提供すること。
【解決手段】 地下にメタンハイドレート層が存在する海底面等の地盤上を自走するための移動機構と、前記地盤を掘削してメタンハイドレートを採取するための掘削機構と、該掘削機構により採取されたメタンハイドレートを加熱分解してメタンガスを取り出すための加熱機構と、該加熱機構による加熱により生じたメタンガスを海上基地等の貯蔵場所へと輸送するための輸送パイプと、前記移動機構及び掘削機構に動力を供給する原子炉とを一体的に備えてなり、前記加熱機構の熱源として該原子炉から取り出した熱エネルギーを利用するメタンハイドレート採鉱用ロボットとする。
(もっと読む)
水中移動体および空気中移動体
【課題】 長時間にわたって正確な位置に移動可能な流体中移動体を提供する。
【解決手段】 本体(11)と、本体を流体中に浮遊させる浮体(18)と、流体の流れを利用して発電する発電手段(39)と、係留部(34)を備えたワイヤ(33)の巻取りおよび繰出しを行うと共に本体に取り付けられた少なくとも一つのワイヤ巻取手段(30)とを具備し、該ワイヤ巻取手段は発電手段により発電された電力を利用できるようになっており、ワイヤの係留部によって本体を流体中に係留した後で、ワイヤ巻取手段を用いてワイヤを巻取りおよび繰出すことによって、本体を流体中において移動させるようにした流体中移動体(10、100)が提供される。流体中移動体の本体に設けられた方向舵(29)を水の流れに応じて変更するようにしてもよく、係留部は、水底または地面に予め配置された係合部(70)に係合して本体を係留するようにしてもよい。
(もっと読む)
無人の水中航走体
無人の水中航走体であって、耐圧殻と、駆動ユニットと、耐圧殻に配置された少なくとも1つの付属器具、たとえばプロペラ用の保護装置(15)とが設けられている形式のものにおいて、水中航走体のトリム調整位置を変更することなしに、付属器具を交換するか、または付加的な付属器具を耐圧殻に配置することを可能にするために、付属器具(15)が浮力体(16)に固く結合されており、該浮力体(16)が、水の密度に比べて小さな密度を有している。浮力体(16)の密度および体積は、水中で付属器具(15)と浮力体(16)とに作用する浮力が、付属器具(15)と浮力体(16)とに作用する重力を補償するように設定されている。  (もっと読む)
(もっと読む)
液中作業装置及び液中作業方法
【課題】
貯蔵プールの水中で、狭隘部や障害物があっても、目的とする部位の各種作業を遠隔地点から行うことにある。
【解決手段】
水中を航行する遠隔操縦式移動体であるROV6,17,26に電動ウインチ8と空気袋6bに接続された吸着パッド6aや、内視鏡カメラ22やサンプリングヘッド29を装備させ、それらを貯蔵プール1の外側から操作卓13等で操縦して、容器2を吸着パッド6aで吸着保持して検査個所から移動させる作業や、内視鏡カメラ22を用いてその移動跡での観察作業を行ったり、サンプリングヘッドで貯蔵プール壁面に付着した物質の採取作業を行ったりする。
(もっと読む)
輸送手段
本発明は、乗客及び/又は品物を輸送するのに使用され、風力と水の揚力とを利用し、水面から上方を走行する客室(5)を有する、輸送手段(10)に関する。本発明の目的を達成するために実現された輸送手段は、水面から上方の或る高さを走行する少なくとも1つの本体(12)と、水面に対して垂直に延び、この本体(12)に接続されている少なくとも1つの帆(1)を備えている空中ユニット(11)と、水中を走行し、これも本体(12)に接続されている少なくとも1つの水中ユニット(13)と、を備えている。 (もっと読む)
機器艤装船舶
【課題】コンパクトな構造で、かつROVの位置の検知精度が向上する。
【解決手段】推進機を備え、測量や調査等に用いるROVの位置を検知するトランスポンダと、3個以上のトランスデューサを船体に艤装する機器艤装船舶であり、トランスデューサを取り付けた支持部材と、支持部材を直線状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の内部に位置させ、使用時に直線状に移動させて船体の開口部から斜め側方へ突出して水中へ入れる。また、トランスデューサを取り付けた支持部材と、支持部材を円弧状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の幅より内側に位置させ、使用時に円弧状に移動させて船体の幅より外側の水中へ入れる。
(もっと読む)
101 - 110 / 112
[ Back to top ]