
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
51 - 60 / 112
管内調査機器、管内調査システム、管内調査機器の浮力及び姿勢調整方法及び管内調査方法。
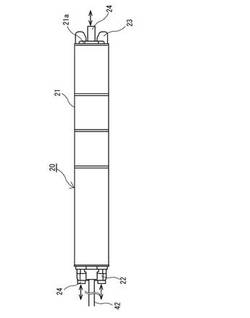
【課題】水道本管等の調査において、本管に投入され、ケーブルを曳航しながら管内の調査を行う管内調査機器において、容易に浮力及び姿勢調整を行うことができる管内調査機器、管内調査システム、管内調査機器の浮力及び姿勢調整方法及び管内調査方法を提供する。
【解決手段】ケーブル42を曳航しながら管内を調査する管内調査機器20において、前部と後部の少なくとも一方に、管内調査機器20の本体21から浮力体24aの突出量Dを変化させることにより浮力を増減する浮力調整装置24を設けて浮力と姿勢を調整するように構成する。
(もっと読む)
管制型水中情報収集システム及び水中航走体管制システム

【課題】水中航走体による水中情報の収集効率を低下させることなく、一定の精度で位置検出を行うことができるとともに、また、複数の水中航走体を管制することで、効率よく水中情報を収集すること。
【解決手段】絶対位置取得部10により水上移動体3の絶対位置を取得するとともに、相対位置計測部11により水中航走体4の相対位置を計測し、これらの情報から水中航走体4の絶対位置を検出する。そして、この絶対位置情報を第1通信部13から第2通信部22へ送信することにより、水中航走体4に対して絶対位置情報を通知する。
(もっと読む)
水中航走体の発射回収システムおよびこの発射回収システムを備える船舶
【課題】小型船舶で安全に水中航走体の発射回収を行うことを目的とする。
【解決手段】水中を航走可能な水中航走体5と、水中航走体5を水中で発射または収容する発射回収カゴ3と、発射回収カゴ3に配置され、水中航走体5を誘導する誘導信号を発するピンガP1、P2,P3,P4とを備え、水中航走体5には、ピンガP1、P2,P3,P4から発せられた誘導信号を受信するハイドロフォン23と、ハイドロフォン23からの信号に基づいて発射回収カゴ3の位置および姿勢を計測する位置姿勢計測部と、位置姿勢計測部により計測された発射回収カゴ3の姿勢に合わせて水中航走体5の姿勢を制御する姿勢制御部とが設けられている水中航走体の発射回収システム10を提供する。
(もっと読む)
食料及びエネルギーのためのロボット利用海洋養殖の方法及び装置
ロボット利用海洋養殖場は、太陽光露出のための第1の浮上位置及び栄養素収集のための第2の沈水位置に支持格子を位置決めするための沈水可能な牽引システムを有する、海草支持格子を含む。この牽引システムは、航行及び横方向張力維持のための、格子の前部に連結される牽引ボートを組み込む。反応ボートが格子の後部周囲に連結される。収穫ステーションが、航行中にある位置でこの養殖場と出会うように配置される。基地ステーションは、養殖場の動作のために相互支持及び情報交換を与えるために養殖場と通信する。 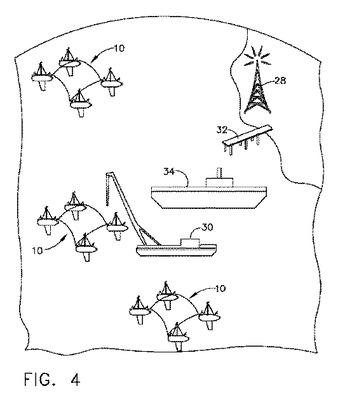 (もっと読む)
(もっと読む)
水中物体捜索システム
【課題】捜索管制艦艇の安全を確保しながら、水中物体を捜索することが可能な水中目標捜索システムを提供する。
【解決手段】捜索管制艦艇から飛行缶体2を飛翔させ捜索水域に着水させる。着水後、飛行缶体2は飛翔ロケット部21と航走センサ22とに分離される。飛翔ロケット部21は、ロケット部211と水中部212とで構成され、ロケット部211は水中部212の分離後にアンカーになる。水中部212は、自己位置をGPS受信機21224で測定し、水中位置監視装置21225で得た航走センサ22の位置および航走センサ22で収集した捜索用データとともに捜索管制艦艇の艦上管制部1にデータ伝送する。航走センサ22は、ソーナー222,磁気センサ223,カメラ224等の捜索用センサを搭載し、捜索用データを記録する。記録された捜索用データは非接触型データ送受信装置221,21221を介し記録データ中継部2122に吸い上げられる。
(もっと読む)
水中航走体
【課題】効率のよい航走をさせることができるとともに、水中航走体を母船上から水中に投入、あるいは水面付近から母船上に揚収するクレーン等の機械装置を小型化することができ、また、航空機での運搬および航空機から水中に投入することができる水中航走体を提供すること。
【解決手段】分解可能な複数の円筒形の耐圧容器11a,12a,13a,14a,15aを互いに結合して構成される水中航走体10であって、前記耐圧容器11a,12a,13a,14a,15aの内部には、それぞれ異なる機器11b,12b,13b,13c,14b,15b,15cが収められているとともに、各耐圧容器11a,12a,13a,14a,15aが、モジュール化されている。
(もっと読む)
水中航走体誘導方法及び装置
【課題】目標が母船から遠距離にある場合でも、水中航行体を精度良く目標に誘導する、誘導方法を得る。
【解決手段】水中航走体102から見た目標(体)104の方位情報を観測し、水中航走体102の母船101から見た目標104の方位情報および周波数情報を観測し、観測した方位情報及び周波数情報に基づいて、目標104の位置、針路及び速力を推定し、推定した目標104の位置、針路及び速力に対応して、水中航走体102の針路を決定し、決定した針路に水中航走体102を誘導する水中航走体102の誘導方法および装置である。
(もっと読む)
振動翼推進装置
【課題】振動翼推進装置において、振動翼の羽ばたき運動の流体力学的特性を改善することにより、振動翼の対配置等の複雑な振動翼駆動機構あるいは振動揚力相殺機構等を要することなく、振動揚力を消失して推力を得ることのできる優れた振動翼推進装置を提供する。
【解決手段】
無次元振動数が0.00から1.00までの値の範囲において、弧度法による振動翼の迎角振動振幅の値を当該振動翼の半翼弦長で無次元化した当該振動翼の並進振動振幅の値により除することで得られる当該振動翼の振幅比の値を当該無次元振動数の0.75倍の値を中央値としてプラス/マイナス0.1の範囲の値に設ける。
(もっと読む)
水中航走体遠隔操作システム及び同システムの光ケーブルのドラム巻装面調整装置
【課題】電波の伝わらない水中にあっては水中の航走体と水面上の中継部との間を光ケーブルを利用し、水面上の中継部と離れた指令部との間は電波を利用して、電波の伝わらない水中の航走体とこれから離れた箇所の指令部との間で多量の情報の交信を可能にすることにある。
【解決手段】水中の表層付近及び浅海域を探索する水中航走体1に光ケーブル3の一端を接続し、水面に浮かべた中継部4に設置されアンテナ33を備えた受信機34及び送信機35に光ケーブル3の他端を接続し、離れた箇所の指令部2から制御信号を電波で水面上の中継部4に送り、水面上の中継部4の受信機34のアンテナ33で受信した制御信号を光ケーブル3を通じて水中の航走体1に送ってこれを制御すると共に、水中航走体1で集めた水中の表層付近及び浅海域の各種の情報を光ケーブル3を通じて水面上の中継部4の送信機35に送り、送信機35のアンテナ33から電波として離れた箇所の指令部2に送る。
(もっと読む)
鋼製矢板構造物の補修工法と補修用作業船
【課題】鋼製矢板構造物の補修作業を、専用の作業船を利用して、海側からの作業で止水箱を所定の個所に容易に設置して行えるようにする。
【解決手段】補修作業用の止水箱3を鋼製矢板構造物51に設置して補修作業を行う補修工法として、止水箱3と、吊り上げ移動装置4とを備える作業船1を、舷側1aと岸壁50との間に間隔Sを保有して繋留し、吊り上げ移動装置4で吊り上げた止水箱3を、作業船1側から岸壁50の鋼製矢板構造物51に近づけるとともに、作業船1と岸壁50との間から所定の高さ位置に降ろし、止水箱3の前面を鋼製矢板構造物51に対し対向させかつ当接させて止水箱3内の水を排出して所定の作業空間を確保するように設置し、補修作業を行う。
(もっと読む)
51 - 60 / 112
[ Back to top ]