
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
31 - 40 / 112
切離機構およびこれを備えた水中切離装置
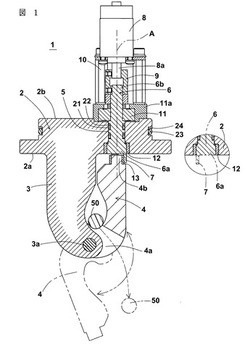
【課題】部品点数が少なく小型であるので安価であり、さらに駆動用のモータを簡便に制御することのできる切離機構およびこれを備えた水中切離装置を提供する。
【解決手段】切離機構1は、台座2の一面2a側に設けられたフック支持部材3に回転可能に一端部4aが軸支されたフック4と、台座2を貫通する孔部5に水密に嵌って回転自在なシャフト6と、台座2の他面2b側に固定されて、シャフト6に回転軸8aが連結されたモータ8とを備え、シャフト6は、その一端部6aの縁端の一部に、シャフト6の軸A方向に突出してシャフト6の回転と共にその軸Aの周りを移動するフック固定ピン7を有し、フック固定ピン7が台座2の一面2a側よりも突出して配置されており、フック固定ピン7が所定の位置でフック4の他端部4bを係止してフック4が固定され、モータ8の回転でフック固定ピン7が移動してフック4の固定が解除されるものである。
(もっと読む)
水中航走体用推進機構及び水中航走体

【課題】簡素な機構で大きな推力を得ることができ、駆動力の伝達効率性、省エネルギー性、量産性に優れた水中航走体用推進機構の提供。
【解決手段】基部2と、基部に鉛直方向と平行に配設された旋回軸3と、一端が旋回軸に固設された旋回アーム部4と、旋回軸を中心に旋回アーム部を水平面内で左右方向に回動させる旋回用駆動部5と、長尺板状に形成され旋回アーム部の他端側から後方に延設された垂直状の弾性振動翼7と、旋回アーム部の弾性振動翼よりも前方に鉛直方向と平行に配設された回動軸8と、弾性振動翼の左右両側に対向して張設され前端部が回動軸に固定され後端部が弾性振動翼の後端に固定された一対の駆動用弾性体9a,9bと、回動軸を回動させて一対の駆動用弾性体と共に弾性振動翼を揺動させる推進駆動部10と、を備えている。
(もっと読む)
水中走行装置
【課題】水底をスムーズに走行することが可能な水中走行装置を提供する。
【解決手段】車体と、車体に設けられた複数の走行体36aとを有し、走行体36aは、複数の回転自在な輪体55〜58と、これら輪体55〜58に巻装された無端回動体60とを有し、輪体55〜58は、前部輪体55と、後部輪体56と、これら前後部両輪体55,56間に配設された中間部輪体57と、駆動輪体58とからなり、後部輪体56と中間部輪体57とは水平面62から同じ高さにある基準位置Pに設けられ、前部輪体55は基準位置Pに対して上下方向へ揺動自在であり、前部輪体55を上下揺動させる上下揺動手段63が設けられている。
(もっと読む)
多段階均圧ホースを使用する深海底の遠隔探査装置
【課題】黒潮による発電能力は流速の3乗に比例するので、できる限り急流域に発電設備を設置しなければならないが、これを利用する発電設備は巨大で水深1000m以上の急流域に固定係留しなければならない。かかる深海底に固定する係留設備を低コストで建設する方法としてロケット杭を海底に撃ち込む方法があるが、この撃ち込みにはあらかじめ海底の状況を確認することが必要である。
【解決手段】水深10mごとに水圧が1気圧増加するので、耐水性蛇腹ホースを例えば50mごとに小型空気圧縮機をはさんでホース接続を繰り返し、空気圧縮機ごとに外周の水圧に合わせて増圧するとホース内外の圧力はどの水深でもほぼ均等になり深海までホースが到達できる。このホースの先端に海底観察、海底土採取などの耐圧機器を装備し、海上からビデオカメラで観察しながら遠隔操作すれば、必要な深海探査を簡便に実施できる。
(もっと読む)
水中航走体の自律制御方法及び自律制御型水中航走体
【課題】 巡回経路上に障害物が存在していても、緊急回避動作回数を低減させる。
【解決手段】 ウェイポイント制御により巡回経路に沿って設けた各ウェイポイントを巡回させる自律制御型水中航走体が、1つのウェイポイントの場所から次に辿る順序のウェイポイントの場所を目標地点として移動する経路上で、水中航走体に装備した障害物検出ソナーにより経路上の障害物が検出されると、水中航走体を障害物のない方向へ移動させる緊急回避動作を行い、回避終了時の水中航走体の位置に、巡回経路の次の周回以降に経由させるための新たなウェイポイントを追加する。これにより、障害物が検出された周回の次の周回以降は、水中航走体を、追加されたウェイポイントを経由させることで、障害物に差し掛かることなく巡回させる。
(もっと読む)
潜水機システム
【課題】潜水機を運用する深度が深くなっても、潜水機自体の重量の増加やケーブル(電力線)が太くなることを防止できる潜水機システムを提供する。
【解決手段】甲板40に配置されるコントローラ10により無人の潜水機20を制御する潜水機システム1において、潜水機20と、潜水機20に電力を供給するための電池32を内蔵する、中継器30と、甲板40に配置されるワイヤーウインチ41と中継器30とを接続する、吊り下げ用のテンションメンバー3と、潜水機20とコントローラ10とを接続する、送受信用の通信線4と、中継器30と潜水機20とを接続する、電力供給用の電力線5と、を備えている。
(もっと読む)
潜水体
【課題】軽量且つ単純な機構を有し、水中を移動可能な潜水体を提供する。
【解決手段】水中を移動可能な潜水体1であって、固定位置から延び、当潜水体1を連結する紐状部材7と、紐状部材7の長さを調節する長さ調節機構と、推進力を発生させるスラスタ11を有し且つ水流の方向に対する姿勢に応じて異なる流体抵抗を示す形状からなる本体部材2と、本体部材2を紐状部材7に接続するアーム部材3,4と、アーム部材3,4に対する本体部材2の姿勢を制御するアクチュエータ5,6とを具備し、潜水体1が目標位置に移動するように、紐状部材7が張った状態にあるときに、本体部材2が水流を受けることにより生じる抵抗及びスラスタ11の推進力の一方又は両方によって本体部材2に作用する紐状部材7の牽引力の方向をアクチュエータ5,6によって制御すると共に紐状部材7の長さを長さ調節機構によって制御する。
(もっと読む)
水柱観測装置
【課題】係留索の固定箇所に制約されずに広範囲に水柱が観測できる水柱観測装置を提供する。
【解決手段】水底Bに下端を固定した係留索2の上端に浮力材3を取り付けて前記係留索2を水中に立ち上げ、前記係留索2にセンサ4を取り付け、前記係留索2を移動させることにより、前記センサ4を前記下端固定箇所より離れた所望の場所まで移動させてその場所の水柱における物理量を測定する。
(もっと読む)
自律航走体運動モニタ用ディスプレイ装置
【課題】自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供する。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
(もっと読む)
中層浮魚礁の回収方法及びこれに使用する回収用金具
【課題】設置場所の水深等の作業条件に左右されにくく、簡単かつ確実に中層浮魚礁のすべての構成部材を引き揚げることのできる回収方法と、この方法で使用する回収用金具を提供する。
【解決手段】海底に設置されたアンカー2に結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁1に対して、作業船10から吊り下げた案内索11の先端部を移動しながら魚礁本体に掛止させて作業船10を固定した後、作業船10から繰り出す回収索15の一端側と結合する回収用金具20が前方に着脱可能に取り付けられた無人潜水機13を、案内索11を利用しながら魚礁本体の近くまで降ろし、無人潜水機13を操作して回収用金具20を係留索に結合させ、無人潜水機13を引き揚げた後に回収索15を巻き上げて中層浮魚礁1をそのままの状態で引き揚げる。
(もっと読む)
31 - 40 / 112
[ Back to top ]