
国際特許分類[B65G1/137]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 倉庫またはマガジン内における,物品の個々にまたは秩序だった貯蔵 (4,068) | 貯蔵装置 (3,167) | 機械的なもの (2,886) | 取出す物品を選択するための装置または自動制御手段をもつもの (1,643)
国際特許分類[B65G1/137]に分類される特許
1,621 - 1,630 / 1,643
回転式物品配分システム

【課題】 配分作業者の歩行距離をできるだけ少なくするとともに、コンテナの入替え作業を無くして配分作業時間の短縮と負荷の軽減化及び効率化を実現できる物品配分システムを提供する。
【解決手段】 回転式棚装置10の直線移動領域の一方が複数の投入間口に分割されて、1つの投入間口内にある複数のコンテナ20に対して1人の配分作業者が商品の投入を行うようにされる。各投入間口における各コンテナの載置部に対応するように複数のディジタル表示器30が設置される。各ディジタル表示器には、対応するコンテナへの商品の投入個数と、投入完了を示す押釦スイッチとが設けられる。管理制御部は、各投入間口のすべてのディジタル表示器の押釦スイッチがオンにされると、回転式棚装置を1つの投入間口分だけ回転移動させると共に新たに各投入間口内に位置することとなった載置部に対応するすべてのディジタル表示器の配分数表示部の投入個数表示を変更する。
(もっと読む)
文書管理装置、文書管理方法およびプログラム

【課題】 紙文書とその紙文書を表すデータを保存する場合に、所望の紙文書を探し出すことを容易にする。
【解決手段】 収納庫70から送信されたタグ識別子を受信し、タグ識別子と収納庫70を特定する情報とを対応付けて記憶させる。次に、受信されたタグ識別子に対応する文書の収納庫70内における位置を表す位置情報を取得する。次に、取得された位置情報に基づいて、収納庫70に収納されているすべての文書の収納庫70内での配置を図示する画像を生成して表示する。抽出された文書データに対応する文書の収納庫70内での位置を強調して表示する。
(もっと読む)
自動倉庫システム
【課題】ランニングコストを低減することができる自動倉庫システムを提供することを課題とする。
【解決手段】在庫管理コンピュータ20は、例えば第1の自動倉庫4及び第2の自動倉庫5全体での在庫数が各自動倉庫4及び5の棚数以下になると、第1の自動倉庫4と第2の自動倉庫5とにそれぞれ収容されている荷物をどちらか一方の自動倉庫に集約することにより他方の自動倉庫を空にすることができると判断し、このとき第1の自動倉庫4の在庫数≧第2の自動倉庫5の在庫数であれば、第1の自動倉庫4及び第2の自動倉庫5のスタッカクレーン7及び9と搬送装置15を制御して、在庫数の少ない第2の自動倉庫5の収容棚8に収容されている荷物を全て第1の自動倉庫4の収容棚6へと移動し、第2の自動倉庫5が空になると第2の自動倉庫室3の空調装置11の運転を停止する。
(もっと読む)
品物監視用システムおよび品物監視用システムの使用方法
品物監視用システムおよび品物監視用システムの使用方法。特に、本発明は、センサであって、このセンサに対応する第1の大きさの空間内の複数の品物を検知し、かつ、金属を含む品物と金属を含まない品物の両方を検知するセンサと、通信ネットワークと、センサから通信ネットワーク経由で情報を受信するコンピュータと、を含む品物監視用システムに関する。また、本発明は特に、品物を監視して、センサに対応する第1の大きさの空間内の品物の数を決定するための方法に関する。 (もっと読む)
品物を追跡するためのシステム
品物が通過する少なくとも1つの開口を有する建物内の品物を追跡する品物追跡システムが提供される。品物追跡システムは品物に取り付けられた無線周波数タグと、リーダアンテナに動作可能に接続されたリーダと、該リーダに動作可能に接続されたプロセッサと、リーダアンテナ用の垂直宙吊り支持可動部とを有する。タグは品物情報を格納し、リーダはタグから品物情報を読取ることができる。プロセッサは品物情報をリーダから受信し格納する。可動支持部は開口の頂上に隣接する場所から宙吊りにされている。支持部とリーダアンテナは品物が開口を通過できるように品物の回りを移動できる。リーダは品物が開口を通過するときリーダアンテナを用いてタグから品物情報を読取る。 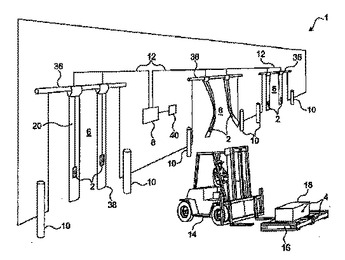 (もっと読む)
(もっと読む)
配送物の追跡方法及びシステム
配送物のネスティングを追跡する方法及びシステムが提供される。その方法及びシステムは、コンベヤシステムの終端のような場所から、どの郵便取扱者が特定のトレイを取り上げるかを決定するために、受動型RFIDタイプあるいは自動検出タイプの通信デバイスを用いることを含む。郵便取扱者がトレイをコンテナに置いたとき、他のRFIDタイプのデバイスが、郵便取扱者がトレイをどのコンテナに置いたかを検出するために使用される。そして、この情報は、トレイが正しいコンテナに置かれたことをリアルタイムで確認し、証明するために、情報をデータベースに保存するアプリケーションサーバへ受動的且つ/又は無線で送信される。これらの方法及びシステムは、例えば、輸送車両中のコンテナの配置を含む、他のネスティング環境へ等価的に適用可能である。 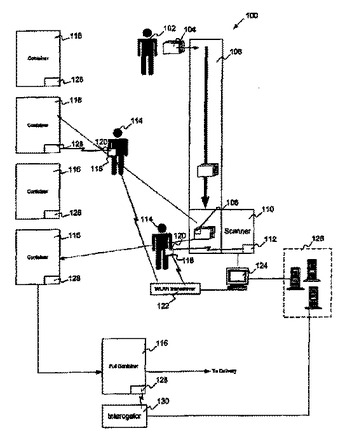 (もっと読む)
(もっと読む)
制御領域内のアイテムの位置を追跡するよう倉庫を構成するシステム及び方法
制御領域内のアイテムの位置を追跡する位置追跡システムは、位置判定の要求精度によって配置される複数のRFIDタグを備える。追跡されるアイテムを運搬するよう構成される車両は、複数のRFIDタグからRFID情報を獲得し、RFIDタグ情報をロケーション・オーソリティに伝送するよう構成される2つのRFIDインテロゲータを含む。2つのRFIDインテロゲータの間隔は、要求精度が生じるような、複数のRFIDタグの間隔に基づいて設定される。ロケーション・オーソリティは、複数のタグ毎の各々について記憶される座標情報にRFIDタグを単にマッピングして、車両と、よって、運搬されるアイテムとの位置を得ることができる。 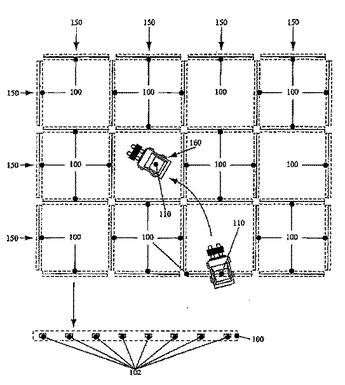 (もっと読む)
(もっと読む)
コンベアシステム上の積荷を追跡する方法及びコンベア装置
積荷の後縁を用いてコンベア装置上の積荷の追跡を行なう方法及び装置に関する。当該方法は、第1のセンサで積荷の後縁を検出するステップと、該第1のセンサによる積荷の後縁の検出に応答して積荷の積荷記録を更新するステップとを有する。当該装置は、コンベアと、コントローラと、該コントローラと通信接続されコンベア上の積荷の後縁の検出を行なうセンサとを備える。 (もっと読む)
画像ディスプレイを備えた在庫システム
ピック/プットツーディスプレイ(PTD)装置(106)は、PTD装置(106)が製品の画像又は指示ビデオなどの製品に関する画像(320)を表示できる画像ディスプレイ(208)を含む。PTD装置(106)は、製品の画像(320)を表示する機能を有することにより、保管場所に間違った製品がピック、プレースされるリスクを低減させることができる。画像ディスプレイ(208)により、PTD装置(106)が複数の方向を指すことができる矢印(328)を表示できるようになる。多数の方向を指す矢印(328)を有する機能により、単一のPTD装置(106)が複数の保管場所をサービスすることができ、これによって必要とされるPTD装置(106)の数が低減される。PTD装置(106)は更に、製品のサウンドファイルをダウンロード及び再生できるため、音声による指示又は警報を再生することができる。  (もっと読む)
(もっと読む)
棚システムの状態を追跡するための方法
積荷を監視する方法は、積荷保管装置(66)のまわりに配置されている1つまたは複数の荷重センサ(58、60、62、64)によって生成される初期状態出力信号(150)および現在の状態出力信号(154)を監視するステップを含む。初期状態出力信号と現在の状態出力信号(152、156)とが比較されて、積荷保管装置(66)に配置されている積荷(68)の変化が決定される。
 (もっと読む)
(もっと読む)
1,621 - 1,630 / 1,643
[ Back to top ]