
国際特許分類[B66C13/22]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 他の構造上の特徴または細部 (1,024) | 制御方式または制御装置 (466) | 電気駆動用のもの (204)
国際特許分類[B66C13/22]の下位に属する分類
荷物の降下制御用の回路 (34)
ブレーキ用モータ,横行用モータまたは旋回用モータのための回路 (6)
荷物のもち上げ,下げ用およびバケツトあごの開閉用の両方に使用するところの1個またはそれ以上の電動機装置によりグラブバケツトのもち上げ操作をするためのもの (15)
国際特許分類[B66C13/22]に分類される特許
101 - 110 / 149
クレーンのステアリング装置
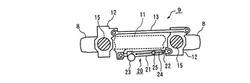
【課題】構造が簡易で油漏れのないタイヤ走行式クレーンのステアリング装置を提供する。
【解決手段】クレーン本体の脚部に接続されたボギー11に固定されたブレーキ付き電動ジャッキ20により片方のヨーク12を回転軸15のまわりに旋回させ、連結ロッド13を通じて他方のヨーク12を連動させることにより、2本のタイヤ8の向きを任意の方向に変えてブレーキにより保持する。
(もっと読む)
コンテナ搬送クレーン、移動体のコントローラ、コンテナ搬送クレーンの制御方法

【課題】吊り荷の振動、操縦室の振動等によって、操作に悪影響を及ぼすのを軽減することのできるコンテナ搬送クレーン、コンテナ搬送クレーンの制御方法等を提供することを目的とする。
【解決手段】コンテナ搬送クレーンを操作するための操作レバー30と、ワイヤ駆動装置24との間に、制御部40が備えられ、この制御部40は、操作レバー30をオペレータが操作したときの操作信号を受け取り、操作信号の特定周波数域の振動成分を除去するノッチフィルタ41を備える。ノッチフィルタ41では、コンテナ搬送クレーンの固有振動数を含む特定の周波数域の信号の振動成分を除去するようにし、制御部40では、前記の振動成分を除去した操作信号をワイヤ駆動装置24に入力するようにした。
(もっと読む)
走行制御装置及びこれを用いた移動体
【課題】移動体の走行方向制御を良好に行うことを可能にしながら、低コストでかつ走行方向を切替える際の無駄時間の少ない走行制御装置及びこれを用いた移動体を提供する。
【解決手段】移動体の動作を制御する走行制御装置を、レーンL上の走行位置合わせガイド用標識を検出するガイドライン検出器46(標識検出器)と、移動体に対して空中に浮いた状態にして設けられてガイドライン検出器46を空中に浮いた状態にして支持する支持構造部51とを有する構成とする。支持構造部51を、移動体に対して少なくともガイドライン検出器46の取付部位を上下方向に変位可能にして設けられる基部53と、基部53の可動範囲を規制する下限位置規制装置54と、基部53に対してガイドライン検出器46よりも下方に、ガイドライン検出器46と走行位置合わせガイド用標識との近接限界距離以上突出して設けられるギャップ規定部材56とを有する構成とする。
(もっと読む)
焼鉱搬送クレーン設備および焼鉱搬送クレーン設備の位置決め制御方法
【課題】焼鉱を装入した搬送用コンテナを原点位置から電気炉上にある焼鉱ビンへ搬送する際の停止位置について、高精度の位置決めを可能とすることにある。
【解決手段】焼鉱を装入した搬送コンテナ11を搬送装置1によって複数の焼鉱ビンA〜Iへ搬送する焼鉱搬送クレーン設備において、搬送装置1は、X軸方向に移動する走行装置2と、走行装置2を駆動する走行モータ3と、走行装置2の走行車輪40に直結した走行距離検出用ロータリーエンコーダ4と、走行距離検出用ロータリーエンコーダ4からの信号を走行距離に変換する走行距離検出装置5と、Y軸方向に移動する横行装置6と、横行装置6を駆動する横行モータ7と、横行装置6の横行車輪41に直結した横行距離検出用ロータリーエンコーダ8と、横行距離検出用ロータリーエンコーダ8からの信号を横行距離に変換する横行距離検出装置9とからなる。
(もっと読む)
協調搬送方法および協調搬送装置
【課題】搬送重量あたりの機器コストを低減でき、重量物の搬送に有利な協調搬送方法および協調搬送装置を提供する。
【解決手段】
複数台の移動式クレーンロボット10A(リーダ11およびフォロワ12)により搬送物体1を共吊りしながら目的地まで搬送する。搬送物体1とフォロワ12のワイヤ6との接続点にマーカ13を設置し、マーカ13を上方から撮像する撮像装置8をフォロワ12に設置する。リーダ11に目的地までの動作指令を与え、撮像装置8の画像からフォロワ12の座標系におけるマーカ13の位置を検知して位置情報を生成し、この位置情報に基づいてリーダ11の動作を推定し、推定したリーダ11の動作に基づいてフォロワ12の動作を制御する。
(もっと読む)
クレーンの振れ止め制御方法
【課題】運搬先が毎回異なり、初期巻きロープ長の誤差やその変化がある場合でも、振れ角センサを用いることなく、振れ止め後の残留振れを十分小さくできるクレーンの振れ止め制御方法を提供する。
【解決手段】Input Shaping法によりクレーン5の走行計画を作成する走行計画作成ステップS1と、前記走行計画に基づいてクレーン5の運搬シミュレーションを行って残留振動幅を求める運搬シミュレーションステップS2と、前記残留振動幅が所定の閾値以下の場合に、自動運転作業指令を出力し、前記走行計画に基づき、横行し、かつロープの巻上げおよび巻下げにより目標位置まで運搬する自動運転制御ステップS5〜S7とを有する。
(もっと読む)
ロープトロリー式クレーンの振れ止め制御装置
【課題】振れ角を検出する装置を設けなくても運搬物の揺れを制御することができ、高速作業を行う設備や振れ止め制御にそれほど高い性能が要求されない設備にも採用できるロープトロリー式クレーンの振れ止め制御装置を提供する。
【解決手段】ロープ6の現在の振れ角φを算出する振れ角算出部12と、トロリー5を停止させるために必要な減速度αpを求める減速度算出部11と、トロリー停止位置においてロープ6の振れが停止するために必要な必要振れ角φを算出する必要振れ角算出部13と、現在の振れ角θreaと必要振れ角θrefとの差θdefを算出する誤差算出部14と、ロープ6の振れ角を現在の振れ角θreaから必要振れ角θrefに変更させるために必要なトロリー5の調整減速度αcを算出する調整減速度算出部15と、調整減速度αc基づいて、トロリーの調整速度Vrを指示する速度指令信号を送信する速度制御部16とを備えている。
(もっと読む)
クレーン
【課題】 コンテナを正確に着床できるクレーンを提供することを目的とする。
【解決手段】 トロリ20から吊り下げられた吊下コンテナC1を、下方に設置された設置コンテナC2の上面に載置するクレーン1において、吊下コンテナC1の下面の一端が設置コンテナC2に当接したことを検知する振動検出器30を備えていることを特徴とする。
(もっと読む)
移動体制御装置、これを用いた移動体、及び移動体制御方法
【課題】移動体を異なるレーンに移動させる際の移動体の位置決め作業を容易にしてドライバの負担を軽減する移動体制御装置、これを用いた移動体、及び移動体制御方法を提供することを目的とする。
【解決手段】複数のレーンLが略平行配置されたコンテナヤード1(走行領域)上で移動するトランスファークレーン11(移動体)に、各レーンLに設けられたオートステア用ガイドライン42(走行ガイド用標識)を検出するガイドライン検出器46(標識検出器)と、トランスファークレーン11の動作を制御する移動制御装置48とを設ける。移動制御装置48を、トランスファークレーン11が異なるレーンLに移動する際には、ガイドライン検出器46が移動先のレーンLに対応するオートステア用ガイドライン42を検出したことをもって移動先のレーンLに到達したと判断して、検出したオートステア用ガイドライン42に対してトランスファークレーン11の位置調整を行う構成とする。
(もっと読む)
作業機の遠隔操作装置
【課題】従来の遠隔操作装置の利点を維持しながら、必要に応じて、制御対象部位5の移動方向を一定に維持(固定)できる新規な遠隔操作装置を提供する。
【解決手段】携帯操作部6に移動方向固定スイッチ8を取り付け、この移動方向固定スイッチ8を操作することにより、携帯操作部6からコントローラ7に入力される前記移動方向指示信号が示す基準絶対方位に対する偏角を、移動方向固定スイッチ8操作直前のものに固定するよう構成した。
(もっと読む)
101 - 110 / 149
[ Back to top ]