
国際特許分類[B66C13/22]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 他の構造上の特徴または細部 (1,024) | 制御方式または制御装置 (466) | 電気駆動用のもの (204)
国際特許分類[B66C13/22]の下位に属する分類
荷物の降下制御用の回路 (34)
ブレーキ用モータ,横行用モータまたは旋回用モータのための回路 (6)
荷物のもち上げ,下げ用およびバケツトあごの開閉用の両方に使用するところの1個またはそれ以上の電動機装置によりグラブバケツトのもち上げ操作をするためのもの (15)
国際特許分類[B66C13/22]に分類される特許
81 - 90 / 149
三次元空間搬送装置及び三次元空間搬送方法
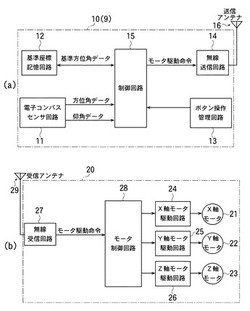
【課題】少ない操作ボタンでオペレータに東西南北上下の6方向を意識させないで搬送装置を操作することができる三次元搬送装置を提供する。
【解決手段】本発明は、搬送対象物を保持して三次元空間において搬送する保持搬送部を有する装置本体部を備え、操作部からの命令に基づいて保持搬送部を三次元空間内において移動させる三次元空間搬送装置である。装置本体部に、保持搬送部をそれぞれ独立してX、Y、Z軸方向へ移動させるための三つのモータ21〜23が設けられるとともに、操作ペンダント9に、操作部本体の位置情報及び傾斜情報を検出するための3軸式の電子コンパスセンサー回路11と、装置本体部の三つのモータ21〜23を動作させるための少なくとも一つの操作スイッチとが設けられ、電子コンパスセンサー回路11にて検出された情報に基づいて三つのモータ21〜23を動作させるように構成されている。
(もっと読む)
ダブル主桁多点吊りクレーン

本発明はダブル主桁多点吊りクレーンに関するもので、主桁、吊り上げ機構、平行移動機構、電気制御システムを含み、その特徴は、下記のようなものである。前記主桁は、それぞれ変断面のある、段差式に配置されたダブル主桁であり、3つ箱桁の高アスペクト比合成梁である。吊り上げ機構は複数基の巻き上げシステムにより構成されていて、各基の巻き上げシステムにそれぞれに複数の吊り点が設けられ、且つ電気制御システムにより前記すべての吊り点を同期させて駆動する。前記巻き上げシステムにはロープ配列機構を据え付けており、かつ直列多層ロープ巻き取りシステムを採用している。平行移動機構は、低位置主桁の両端部に設けられた主桁自走式両方向平行移動機構である。電気制御システムは多点吊りクレーン不静定システム電気制御システムである。
本発明のクレーンは特大吊り上げ荷重、特大吊り上げ高度及び特大スピンの特徴があり、海上石油プラットフォームの大型のブロックの吊り上げ、組立及びドッキングに適用でき、石油プラットフォームの製造方式の変更を促進し、社会に巨大な効果と利益をもたらすこととなり、中国および世界の海洋工程のプロジェクトに深い影響を与える。
(もっと読む)
搬送方法およびこの方法を実施する搬送手段の制御システム
【課題】天井走行クレーンによるパワーアシストを得て、作業者が望む方向へ望む速度で搬送物を移動させる搬送方法において、従来まで制御不可能であった搬送物の姿勢を制御することが可能な搬送物の搬送方法を提供する。
【解決手段】上端がワイヤロープの下端に連結されかつ張力検出手段を付設したロープと、上端がワイヤロープの下端に連結されかつ張力検出手段を付設した電動シリンダロープとによって構成された懸吊手段の下端間に、搬送物を装架させて接続して搬送物を吊り下げ、その後、搬送物に作用する操作力と搬送物の重量による負荷を張力検出手段によってそれぞれ検出し、これらの張力検出手段による検出値からヤコビ行列(JT )−1を用いて、 電動シリンダを収縮作動させるとともにサーボモータを同期化制御して搬送物の姿勢を制御することを特徴とする。
(もっと読む)
クレーン制御システム装置
【課題】 中抜き、中落し時に吊具もしくは吊具に保持されたコンテナと既存に積まれているコンテナとの衝突を防止または回避することができるクレーン制御システム装置を提供する。
【解決手段】 トロリーに設置されるものであって、あるコンテナの積み上げ/積み下ろしする位置に隣接する他のコンテナと前記あるコンテナとの空隙の中心の鉛直上方に配置された複数個の検出器(20A,20B)と、前記検出器が走査し検出する前記空隙方向の距離を演算し、前記あるコンテナと前記他のコンテナとの衝突を前記距離と規定値との比較に基づいて判断する第1の演算処理部(30)と、前記演算処理部(30)において衝突が判断された場合、クレーンの巻上または巻下速度を制限する第2の演算処理部(31)と、を備えた。
(もっと読む)
コンテナのスキュー振れ止め装置
【課題】コンテナが上方に吊り上げられてスプレッダとトロリーが近接した場合でも、コンテナのスキュー振れを止めることができるコンテナのスキュー振れ止め装置を提供する。
【解決手段】スプレッダ7の中心からの距離が互いに等しくなるようにスプレッダの長手方向の中心軸に沿って2個の標識灯9a、9bと、その中心軸に沿って2個の標識灯9a、9bの外側に少なくとも1個の標識灯9cとを配置して、スプレッダ7とトロリー2との間の距離Hに応じて解析制御装置11が標識灯9a、9b、9cのうちからスキュー振れ止めの標的を構成する標識灯を選択する。
(もっと読む)
搬送方法およびこの方法を実施する搬送手段の制御システム
【課題】一般的な天井クレーンを対象とした高次振動を考慮したパワーアシストシステムを構築して,作業者の負担低減とより柔軟な操作を可能とする搬送方法を提供する。
【解決手段】作業者が、天井クレーンをパワーアシストとして用いて荷物を搬送する方法において、天井クレーンのロープ巻揚げドラムから下げされるロープにより吊り下げられて水平移動される荷物に、作業者が操作力である力を加えて、パワーアシストを得ながら作業者が望む方向へ望む速度で当該荷物を移動させるに当たり、ロープの高次振動モードの解析を行い、その結果を基に、高次振動に対してロバストなコントローラをH2/H∞混合制御を用いて設計することを特徴とする。
(もっと読む)
天井クレーンによる搬送方法およびこの搬送方法を利用した天井クレーンシステム
【課題】フルオートシステムとパワーアシストをシームレスで併用し,両者の欠点を補うことで,生産性の向上と作業者の負担低減する天井クレーンによる搬送方法およびこの搬送方法を利用した天井クレーンシステムを提供する。
【解決手段】天井クレーンをパワーアシストとして用いて作業者が、望む方向へ望む速度で半自動的に搬送する方法であって、コンピュータを利用した制御装置によって自動生成された速度指令より移動する天井クレーンを用いるとともに、天井クレーンのロープ巻揚げドラムから垂れ下がるロープ7の下端に掛止されて水平移動される荷物10に作業者の操作力を加えて、天井クレーンによるパワーアシストを得ながら作業者が、望む方向へ望む速度で当該荷物を、搬送開始位置から目標搬送位置の真上までの3次元空間における搬送経路に沿って半自動的に搬送することを特徴とする。
(もっと読む)
時変形システムに対する振動抑制制御入力決定方法、搬送システム、および時変形システムに対する振動抑制制御入力演算プログラム
【課題】時変形システムに対する高い制振効果が得られる振動抑制制御入力決定方法、搬送システム、および時変形システムに対する振動抑制制御入力演算プログラムを提供すること。
【解決手段】実施形態の時変形システムに対する振動抑制入力の決定方法によれば、アーム長変動に伴う固有振動数ωの変動を考慮した振動抑制制御入力u(t)を決定することができるので、その振動抑制制御入力u(t)をX軸サーボモータ40に入力することにより、アーム長の変動に拘わらず、高い制振効果を得ることができる。
(もっと読む)
電動トロリー付き電動チェーンブロックの駆動制御装置
【課題】昇降用電動機及び横行用電動機の単独・同時運転操作が簡単で、同時に昇降用電動機と横行用電動機を駆動でき、更に容量の小さい電磁開閉器を用いることで装置が小型化できる電動トロリー付き電動チェーンブロックの駆動制御装置を提供すること。
【解決手段】電動トロリー付き電動チェーンブロックの駆動制御装置において、横行用電動機19又は昇降用電動機20の駆動を操作ボックスの先行して操作されたスイッチによるものをインバータ12の駆動とし、次に操作されたスイッチ操作によるものを商用電源10の駆動とする制御手段を設けた。
(もっと読む)
天井走行車
【課題】天井走行車の傾斜を補正し、安定して物品の移載ができるようにする。
【解決手段】天井走行車の昇降駆動部の裏面に左右一対の光センサ38,39からなるレーザセンサを設け、昇降台に設けた反射率が所定ピッチで変化する反射板28からの反射光を受光する。2つの光センサの信号を組み合わせて、昇降駆動部と昇降台間の傾斜を反射板28の1/2ピッチで検出し、傾斜補正部24により昇降駆動部の傾斜を補正する。
(もっと読む)
81 - 90 / 149
[ Back to top ]