
国際特許分類[B66C13/22]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 他の構造上の特徴または細部 (1,024) | 制御方式または制御装置 (466) | 電気駆動用のもの (204)
国際特許分類[B66C13/22]の下位に属する分類
荷物の降下制御用の回路 (34)
ブレーキ用モータ,横行用モータまたは旋回用モータのための回路 (6)
荷物のもち上げ,下げ用およびバケツトあごの開閉用の両方に使用するところの1個またはそれ以上の電動機装置によりグラブバケツトのもち上げ操作をするためのもの (15)
国際特許分類[B66C13/22]に分類される特許
71 - 80 / 149
クレーン装置及び走行体の位置検出方法
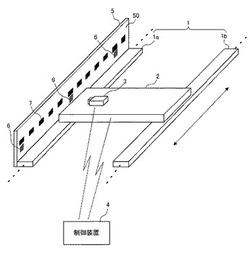
【課題】走行体の移動制御の信頼性及び精度を高めることが可能となるクレーン装置を提供する。
【解決手段】クレーン本体2と共に移動する撮像装置3は、クレーン本体2の移動経路に沿って複数設けられ、起点からの距離である絶対位置を示す絶対位置マーク6と、クレーン本体2の移動経路に沿って一定間隔毎に、且つ、隣り合う絶対位置マーク6間を複数に分割できるようにして設けられた相対位置マーク7と、を撮像する。制御装置4は、撮像装置3が撮像した画像を解析し、走行体2の現在位置を取得する。
(もっと読む)
走行クレーンの操作制御装置

【課題】片手で素早く的確に操作でき、且つ移動速度の微細な制御も可能な走行クレーンの操作制御装置を提供すること。
【解決手段】走行レール101と、該走行レール101に直交する方向に配置され且つ該走行レール101に沿って移動する横行レール102とを備えた走行クレーンの操作制御装置であって、操作筐体11と、該操作筐体11の傾き方向と傾き角度を検出する加速度センサ12と、加速度センサ12で検出した傾き方向・角度に基づいて走行クレーンの移動方向指令信号と移動速度指令信号を生成する指令信号生成手段を備えた操作装置制御回路と、操作装置制御回路の指令信号生成手段からの移動方向指令信号及び移動速度指令信号に基づいて走行クレーンの走行モータ及び横行モータを駆動制御するモータ駆動制御回路を備えた。
(もっと読む)
振れ角補正装置および振れ角補正方法
【課題】振れ角のオフセット量が外乱などで横行中に変化する場合においても、振れ角フィードバック制御の安定性を維持しつつ、振れ角を校正する。
【解決手段】オフセット検出部4は、吊り荷の振れ周期Tpの期間分だけサンプリング処理部3にてサンプリングされた振れ角検出値θdetを平均化することで、瞬時オフセット値θ0を検出し、平均化処理部5は、オフセット検出部4にて検出された瞬時オフセット値θ0を平均化することで、オフセット補償量θostを算出し、補償処理部7は、平均化処理部5にて算出されたオフセット補償量θostにて振れ角検出値θdetを補償する。
(もっと読む)
クレーン走行装置及びクレーン走行装置用インバータ
【課題】1)走行クレーンが目標位置手前で止まりそうなとき、現在運転している速度から再加速、または逆転させ、容易に目的位置に停止させる。2)走行用モートル運転時、加速、減速、逆転動作時はインバータの加減速トルクを調整可能にし、荷振れを大きく増長することなく滑らかに加速、または減速する。3)走行クレーンの応答性がV/Fインバータの10倍以上あり、オペレータが荷振れを加減速動作で吸収できる。
【解決手段】1)急加速、逆転でき応答性を高めるために、速度検出手段を設ける。2)インバータは、速度センサー付きベクトル制御、センサーレスベクトル制御、速度推定演算による速度検出手段を設けた制御などとする。3)コースチング時、パワーオン状態でモートルの最大トルクを制限してブレーキを掛ける。4)コースチング動作後、再加速または逆転時は目標の速度指令に設定した後、変更可能なトルク制限により運転する。
(もっと読む)
クレーンの振れ止め制御方法および振れ止め制御システム
【課題】半径方向の振れも考慮され、旋回終了地点における吊荷の振れの抑制効果に優れたクレーンの振れ止め制御方法および振れ止め制御システムを提供する。
【解決手段】ジブを旋回半径一定として加速区間、等速区間、減速区間の順で旋回させ、加速区間および減速区間の運転時間を、互いに同一の時間であって、吊荷の振子運動の周期Toの略整数倍に設定するとともに、加速区間の終了時点から、遠心力により生じる吊荷の半径方向の振動で最初の最大振れ変位になるまでの時間差を「(Δ/2)・To」として、等速区間の運転時間を「(n+Δ)・To」(n:0以上の整数)に設定する。
(もっと読む)
クレーン振れ止め制御装置およびクレーンの振れ止め制御方法
【課題】トロリーや吊り荷やセンサに外乱が加わった場合においても、目標位置に到達した時の吊り荷の振れを抑制しつつ、短時間内に目標位置に到達させる。
【解決手段】加速度補償器13は、吊り荷の推定加速度a*Laが吊り荷加速度指令aLrに追従するようにトロリー速度補償量ncomaを設定し、ダンピング補償器14は、トロリー速度から吊り荷の推定加速度a*Laまでの伝達特性に対してダンピングがかかるようにトロリー速度補償量ncomdを設定し、補償切換え器15は、トロリーの加減速動作時には、加速度補償器13から出力されたトロリー速度補償量ncomaを選択して加算器6に出力し、トロリーの加減速の終了後には、ダンピング補償器14から出力されたトロリー速度補償量ncomdを選択して加算器6に出力する。
(もっと読む)
スラブベンディングに応じるクレーンのトング位置制御装置及びその方法
スラブベンディングに応じるクレーンのトング位置制御装置を開示する。側面感知手段(20)は、スラブ(S)の側面を把持するクレーン(10)のトング(11)に設置され、前記スラブ(S)のベンディングにより生ずる空隙を検出する。距離感知手段(30)は、前記スラブ(S)と前記クレーン(10)間の距離を感知する。前記制御部(40)は、前記スラブ(S)のベンディングによる空隙情報を用いて前記トング(11)の最終グリップ位置を調節する。前記空隙情報は、前記側面感知手段(20)及び前記距離感知手段(30)によって検出される。  (もっと読む)
(もっと読む)
コンテナクレーンの走行制御装置
【課題】駆動輪に取り付けられた走行モータの回転数を個別に制御して、直進走行させる際の駆動輪間の速度差を小さくすることができ、コンテナクレーンを運転するオペレータの乗り心地を向上させることができるコンテナクレーンの走行制御装置を提供すること。
【解決手段】タイヤ式走行装置11eにより、コンテナヤードに並列にして設けられた複数の帯状のコンテナ設置スペースに沿って走行するコンテナクレーン3の走行制御装置13であって、前記コンテナヤードの設計段階における設計値、あるいは竣工時に実際に計測した計測値に基づいて作成されたコンテナ設置スペース毎の傾斜方向、傾斜量、および傾斜量に対応した前記タイヤ式走行装置11eの旋回角をデータベースとして備え、走行しようとするコンテナ設置スペースが変わる度に、前記タイヤ式走行装置11eの旋回角を設定し直すように構成されている。
(もっと読む)
トロリの空転防止制御装置
【課題】吊荷の振れによって車輪間に輪圧差が生じた場合でも、輪圧の低くなる車輪の空転を確実に防止することができるトロリの空転防止制御装置を提供すること。
【解決手段】車輪によってガーダ上を走行するトロリの空転防止制御装置23であって、前記車輪を駆動するトロリモータ21の駆動トルクが、吊荷に基づく前記車輪の輪圧に応じて決定され、決定された指令が、前記トロリモータ21を制御するトロリモータ制御器22に出力される。
(もっと読む)
制振位置決め制御方法および装置
【課題】相殺するまでの振動が少なく、加速度によって生じる静的な振れよりも大きな振れが発生せず、その分、発生応力を低減でき、加速時間や減速時間を固有周期に合わせる必要がなく任意に設定できる制振位置決め制御方法および装置を提供する。
【解決手段】加速・減速時に振れや弾性変形を生じる移動体の振動を抑制して位置決めする制振位置決め制御方法と装置。移動体の振動を1自由度のばね−質点系でモデル化し、モデルの固有周期Tを求め、加速・減速時の加速度パターンをジャーク一定の増速及び減速を含む台形パターンとし、各ジャーク一定時間を固有周期の整数倍とする。
(もっと読む)
71 - 80 / 149
[ Back to top ]