
国際特許分類[F02N11/04]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備 (130,868) | 燃焼機関の始動;他類に属しない機関の始動補助 (3,616) | 電動機による機関の始動 (2,029) | 発電機と協働する電動機 (396)
国際特許分類[F02N11/04]の下位に属する分類
さらに点火装置をもつもの (2)
国際特許分類[F02N11/04]に分類される特許
41 - 50 / 394
ハイブリッド自動車
【課題】エンジンを始動する際の振動を抑制する。
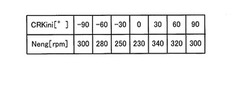
【解決手段】エンジンを始動する際、始動開始時クランク角CRKiniがクランク角範囲A((−90°+nπ)以上(0°+nπ)以下の範囲)内にあるときにはエンジンのモータリングが開始された後にクランク角と所定クランク角とが一致するタイミングでのエンジンの回転数をトルク引き下げ開始回転数Nengに設定し、始動開始時クランク角CRKiniがクランク角範囲A外にあるときには始動開始時クランク角CKRiniがクランク角範囲A内であるときのトルク引き下げ開始回転数Nengより高く且つエンジンのモータリングを開始した後にクランク角と所定クランク角とが一致するタイミングでのエンジンの回転数をトルク引き下げ開始回転数Nengに設定し、トルク引き下げ開始回転数Nengで第1モータからのトルクが小さくなるよう第1モータを制御する。
(もっと読む)
ハイブリッド車両のエンジン始動制御装置

【課題】エンジン始動時にエンジンがフリクションに対してトルクを十分に出力させることのできるハイブリッド車両のエンジン始動制御装置を提供する。
【解決手段】ハイブリッド駆動系の第1,第2クラッチ4,5とモータジェネレータ2とエンジン1とを制御する統合コントローラ20と、バッテリ温度センサ402と、エンジン水温センサ401と、を備えたハイブリッド車両のエンジン始動制御装置600であって、統合コントローラ20は、バッテリ温度センサ402またはエンジン水温センサ401が検出する温度が所定の低温以下のとき、モータジェネレータ2の目標回転数を所定の低回転数に設定して前記エンジンを低回転で回転させた後に、その目標回転数を所定の高回転数に設定して前記エンジンを高回転させる際、前記エンジンの目標回転数をその高回転数より高い回転数に設定する。
(もっと読む)
電動車両の制御装置
【課題】バッテリ異常により強電システムを停止した際に、予備バッテリ等を必要とすることなくエンジンを始動させて、発電装置の稼動による車両の走行継続を可能とした電動車両の制御装置の提供を図る。
【解決手段】強電システムの異常によりバッテリ2からの電力供給が遮断された状況下で、制御装置4は、発電装置3のモータジェネレータ6の慣性回転エネルギーによりエンジン5の回転が維持されている状態で燃料噴射,吸気,点火時期等、エンジン5の再始動運転制御を行う。
(もっと読む)
ハイブリッド自動車
【課題】電動機の駆動回路などの電圧を適正に保持して装置の保護を図ると共に動力性能を発揮させる。
【解決手段】モータMG1によりエンジンをクランキングする際には、モータMG2の回転数Nm2が昇圧回路にLC共振を生じさせる閾値Nref以下のときには、昇圧上限値Vlimに低電圧Vloを設定し(S590)、モータMG2の回転数Nm2が閾値Nrefよりも大きいときには、昇圧上限値Vlimに高電圧Vhiを設定し(S600)、インバータ必要電圧Vinv*と昇圧上限値Vlimとのうち小さい方を昇圧回路の電圧指令VH*に設定する(S610)。これにより、エンジン22のクランキング中に昇圧回路のLC共振によって高電圧系のコンデンサに大きな電圧変動が生じるものとしても、耐圧を超える過大な電圧が作用するのを抑制することができると共に電圧の過剰な制限を抑制して走行性能を発揮させることができる。
(もっと読む)
内燃機関装置およびハイブリッド自動車
【課題】内燃機関をより精度良く目標回転位置に停止させる。
【解決手段】エンジンの自動停止指示がなされたとき、自動停止指示がなされてからの経過時間が所定の自立運転継続時間を経過するまではエンジン自立運転制御を実行し、その後、燃料カットモータリング制御を実行し(ステップS400〜S480)、燃料カットモータリング制御が実行されてからの経過時間tmが所定のモータリング時間を経過し且つエンジンのクランク角CAが判定用角度範囲Cref内になったときには(ステップS490,S500)、エンジンの回転数が引き下げ制御終了閾値Nrefに至るまでエンジン回転引き下げ制御を実行する。これにより、内燃機関をより精度良く目標回転位置に停止させることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両の燃費の向上を図る。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両がEV走行モードで走行している場合において、要求駆動力が所定の閾値になったときに、内燃機関をクランキングするように第1回転電機を制御する始動手段と、内燃機関の停止中にクランク位置を検出するクランク位置検出手段と、内燃機関がクランキングされる前に、検出されたクランク位置に基づいて、クランク位置が目標クランク位置となるように第1回転電機を制御するクランク位置制御手段とを備える。更に、検出されたクランク位置に基づいて内燃機関の始動に要する始動時間を推定し、該推定した始動時間に応じて、内燃機関の始動完了時にバッテリから第1及び第2回転電機に供給される電力がバッテリの出力制限に近づくように、所定の閾値を変更する閾値変更手段を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エネルギー効率を高めつつ、共振による振動を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】第1回転電機は、エンジンとの間で動力伝達が行われ、エンジンの動力に基づき発電する。第2回転電機は、車両の駆動軸と連結し、当該駆動軸の動力に基づき回生制動を行う。蓄電手段は、例えばバッテリであり、第1回転電機及び第2回転電機に電力を供給すると共に、第1回転電機及び第2回転電機の回生電力により充電を行う。制御手段は、第2回転電機の回生制動時に、当該回生電力のうち蓄電手段により充電できない電力に基づき、第1回転電機によりエンジン回転数を上昇させるエンジン強制回転制御を行う。このとき、制御手段は、上述の充電できない電力が、エンジン強制回転制御を実行したときにエンジン回転数が共振回転数より大きくなる電力である場合に、エンジン強制回転制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン始動前に電気走行モードからハイブリッド走行モードへのモード切り替え要求がキャンセルされた際の排気および運転性の悪化を抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】 統合コントローラ20は、EVモードからHEV走行モードへのモード切り替え要求に伴うエンジン始動要求がなされた後、エンジン始動前に当該モード切り替え要求がキャンセルされた場合、既にエンジン回転数Neが上昇を開始しているとき、すなわちエンジン1がクランキング中であるときには、エンジン始動後にエンジン1を停止させる。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジン1による駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】例えばEV走行やシリーズHV走行からパラレルHV走行への走行モードの切り替えに要する切替時間を短縮する。
【解決手段】ハイブリッド車両の駆動制御装置は、ハイブリッド車両の走行モードを、第2回転電機(MG2)のみから駆動軸(OUT)に駆動力を出力する第1走行モード(EV走行、シリーズHV走行)から内燃機関(20)及び第2回転電機から駆動軸に駆動力を出力する第2走行モード(パラレルHV走行)に切り替える際、クラッチ(CR)を滑らせながら係合状態にすると共に、駆動軸に出力される駆動力の変動が小さくなるように、第2回転電機を制御する制御手段(100)を備える。
(もっと読む)
41 - 50 / 394
[ Back to top ]