
国際特許分類[F16H59/14]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置のための制御入力 (10,329) | 入力がトルクまたはトルク要求に関するもの (1,958)
国際特許分類[F16H59/14]の下位に属する分類
トルクの動力測定 (64)
アクセルペダルの位置に依存するもの (943)
スロットル開度に依存するもの (346)
圧力に依存するもの (49)
燃料供給に依存するもの (46)
国際特許分類[F16H59/14]に分類される特許
71 - 80 / 510
車両用動力伝達装置の制御装置
【課題】電気式差動部と変速部とを備える車両用動力伝達装置において、変速部の変速に際してドライバビリティを向上する。
【解決手段】エンジン回転速度NE(エンジン動作点)を目標値とするように第1電動機M1のトルク制御を実行するエンジン運転状態であるエンジンモータリング運転時やエンジン負荷運転時においては、自動変速部20の入力トルクの変動を抑制するように第2電動機M2のトルク制御が実行されることで、第1電動機M1のトルク制御を実行しないエンジン運転状態であるエンジン自律運転時やエンジン停止運転時と比較して自動変速部20のコーストダウンシフトの進行が遅くなる可能性があることに対して、自動変速部20のコーストダウン変速過程における係合側係合圧が増加させられるので、エンジン自律運転時やエンジン停止運転時と同等の変速進行(変速応答性)を確保することが可能になる。
(もっと読む)
車両の動力伝達制御装置

【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置であって、車両発進時に使用される電動機接続状態を適切に選択し得るものの提供。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、及び、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」に選択可能な切替機構を備える。車両が走行状態から停止状態に移行した後において停止状態から車両が発進する場合、停止状態(路面勾配、前後加速度、路面摩擦係数、積載量等)、又は、停止状態に移行する前の走行状態(走行抵抗トルク等)に応じて、発進時の電動機接続状態が選択される。停止状態、又は停止状態に移行する前の走行状態に応じて、要求(或いは、許容)される駆動トルクの大きさに応じた適切な発進時の電動機続状態が選択され得る。
(もっと読む)
動力出力装置、それを備えたハイブリッド自動車および動力出力装置の制御方法
【課題】触媒劣化を抑制するために燃料カットが禁止されている最中に駆動軸に対する減速要求がなされたときに内燃機関の回転数変化をより適正なものとする。
【解決手段】触媒劣化を抑制するためにエンジンの燃料カットが禁止されている最中にリングギヤ軸に対する減速要求がなされたときに、モータMG1からの負のトルク出力と燃料噴射とを伴ってエンジンの回転数Neが回転数Nidleまで低下すると共に要求トルクTr*に基づくトルクが得られるようにエンジンやモータMG1,MG2が制御され(S160〜S200)、回転数Neがアイドル回転数Nidleに達すると、モータMG1からのトルク出力と燃料噴射とを伴って回転数Neが回転数Nidleに維持されると共に要求トルクTr*に基づくトルクが得られるようにエンジンやモータMG1,MG2が制御される(S220,S170〜S200)。
(もっと読む)
動力伝達装置
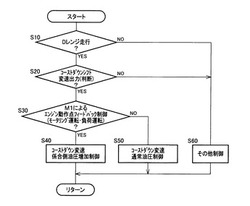
【課題】Dレンジ選択状態での走行中にシフトレンジがN−Dと切り替えられたときに無段変速機と流体圧クラッチとをより適正に制御する。
【解決手段】Dレンジ選択状態での走行中にシフトレンジがN−Dと切り替えられると、クラッチ圧制御バルブ58からクラッチC1に作動油が供給されるよう切替バルブ57が制御され、バルブ58からの油圧がCVT40に許容される上限挟圧に基づく上限値Plimの範囲内に設定された目標圧P*となるようリニアソレノイドバルブSLTが制御され、アクセルペダルが踏み込まれるとエンジンのトルク制限が開始され、クラッチC1が係合すると、トルク制限が解除されると共に目標圧P*が一定レート値で徐増するよう設定され、目標圧P*が上限値Plimまたは切替圧Pchgに達するとライン圧調整バルブ52からクラッチC1に作動油が供給されるようバルブ57が制御される。
(もっと読む)
自動変速機の制御装置
【課題】自動変速機が故障した場合に変速時に変速ショックを悪化させる自動変速機の制御装置を提供する。
【解決手段】複数の変速段を備える自動変速機に故障が発生した場合(S100)に、フェールセーフ制御を行い(S101)、フェールセーフ制御中に加速度Gが所定加速度Gkよりもよりも小さいと判定されると(S105)、フェールセーフ制御中に変速を行う場合に、締結側指令圧に締結側油圧補正量を加算した締結側補正指令圧に基づいて締結側クラッチに油圧を供給して変速を実行するように変速指令を出す(S102)。
(もっと読む)
車両の制御装置
【課題】ライン圧不足を原因としないスリップ締結発生時にライン圧を増大補正してしまうことを防止し、燃費悪化を防ぐことができる車両の制御装置を提供すること。
【解決手段】動力伝達経路上に設けられ、ライン圧を元圧とする作動油圧を制御することで締結/解放状態が切り替わる摩擦締結要素を有する車両の運転状態に応じて、最小ライン圧設定手段を備えた車両の制御装置において、摩擦締結要素のスリップ締結状態を検出するスリップ検出手段と、摩擦締結要素のスリップ締結状態が検出されたときに、作動油圧の指示圧を学習補正してスリップ締結状態を抑制する指示圧学習補正手段と、指示圧学習補正手段による作動油圧の学習補正が収束したことを判断する指示圧学習補正収束判断手段と、摩擦締結要素のスリップ締結状態が検出されたときに、作動油圧の学習補正が収束したと判断された場合、ライン圧を学習補正するライン圧学習補正手段とを備えた。
(もっと読む)
車両の制御装置
【課題】ドライバに違和感を与えることなく車両の発進性能を向上させることが出来ることが出来るようにする。
【解決手段】車両10のエンジン11を自動停止/自動再始動させる自動停止再始動手段42と、ドライバによる加減速要求を検出する加減速要求検出手段32と、検出された加減速要求に応じたエンジン11の出力トルクを要求トルクTRQreqとして検出する要求トルク検出手段81と、エンジン11が自動再始動した場合は、検出された要求トルクTRQreqに応じて、エンジン11と変速機変速機構19との間に介装された自動クラッチ18の係合度合が変化する割合である係合スピードを設定する係合スピード設定手段83とを備えて構成する。
(もっと読む)
自動変速機のパラメータ同定装置
【課題】複数回の実験データからパラメータをより適切に同定する。
【解決手段】1つのパラメータについて行われた同一の運転条件での複数回の実験データに基づく同定結果について、同定時の精度に応じて重み付けして演算する(Step1〜3)。これによって、1つの値に設定する。設定された値を用いてそのパラメータについて複数の運転条件に対するパラメータの値のマップを作成する(Step4)。
(もっと読む)
Vベルト式無段変速機のベルトスリップ率演算装置
【課題】Vベルトスリップ率の演算に際し、既存するプーリ回転センサの検出値のみを用いて、センサの新設なしに当該演算を行い得るようにする。
【解決手段】S21で最ハイ変速比選択状態と判定するとき、S22で工場出荷時にメモリしておいた無負荷&最ハイ時プーリ回転比λoを読み込み、S23で現在のプライマリプーリ回転数Npriおよびセカンダリプーリ回転数Nsecから実プーリ回転比λ=Npri/Nsecを算出し、S24で最ハイ時ベルトスリップ率SLip={(λ−λo)/λo}×100%を演算する。S25で、このベルトスリップ率SLipおよび最ハイ時目標ベルトスリップ率SLip*間の偏差ΔSLipを求め、S26,S27で、最ハイ変速比を保ってΔSLip=0にするのに必要な目標プライマリプーリ圧Ppri*を求めると共に、プライマリプーリ圧Ppriとしてそのまま用いるライン圧PLが目標プライマリプーリ圧Ppri*に一致するような駆動デューティーをライン圧制御弁に出力する。
(もっと読む)
自動変速機の制御装置
【課題】変速制御をより簡易とすることのできる自動変速機の制御装置を提供する。
【解決手段】自動変速機11は、複数の係合要素を備え、各係合要素の解放と係合とを通じて変速を行うよう構成されている。こうした自動変速機の制御を司る電子制御ユニット12は、変速に際して解放される係合要素の変速前の伝達トルク容量を演算するとともに、その演算された伝達トルク容量の大きさに応じて変速制御の制御パターンを選択することで、変速制御の簡易化を図っている。
(もっと読む)
71 - 80 / 510
[ Back to top ]