
国際特許分類[G01B5/20]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 機械的手段の使用によって特徴づけられた測定装置 (1,646) | 輪郭または曲率測定用 (357)
国際特許分類[G01B5/20]の下位に属する分類
複数の固定した同時作動の変換器を使うもの, (5)
曲率半径測定用 (3)
球面計
国際特許分類[G01B5/20]に分類される特許
81 - 90 / 349
超電導線材の検査装置および検査方法
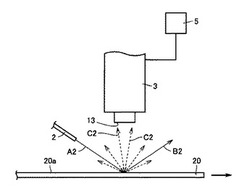
【課題】超電導線材の欠陥を感度よく検査する
【解決手段】超電導線材の検査装置は、超電導線材(20)の表面(20a)の法線方向に光を照射する青色LED(1)と、超電導線材(20)の表面(20a)の法線方向と角度をなす方向に光を照射する赤色LED(2)と、超電導線材(20)からの反射光(B1)を主として受光し、かつ超電導線材(20)からの散乱光(C2)を主として受光するカラーラインセンサ(3)と、カラーラインセンサ(3)にて受光した光の光量を積算して出力するコンピュータ(5)とを備えている。
(もっと読む)
形状測定機の公差検出方法及び装置

【課題】分割して測定して求めるしかなかった、連続して測定するのが困難な形状を有する測定対象の形状の公差を、1回の計算で容易に検出可能とする。
【解決手段】連続して測定するのが困難な形状を有する測定対象の形状の公差を検出する際に、設定された複数の部分測定データを抽出し、先頭の部分測定データから基準位置を設定し、該基準位置を用いて、各部分測定データを一つのデータに結合し、該結合したデータを用いて公差を計算する。
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 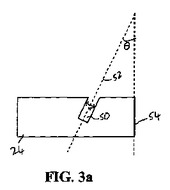 (もっと読む)
(もっと読む)
表面性状測定機
【課題】スタイラスの交換時期を適正に知らせることができる表面性状測定機を提供する。
【解決手段】操作キー51〜58によって入力されたしきい値を記憶するしきい値記憶部64と、スタイラス33のトレース方向の移動距離を検出するスタイラス移動距離検出器36と、このスタイラス移動距離検出器によって検出されたスタイラスの移動距離を累積記憶する累積移動距離記憶部65と、しきい値記憶部64に記憶されたしきい値と累積移動距離記憶部65に記憶された累積移動距離とを比較し、累積移動距離がしきい値を超えたときにスタイラスの交換を表示器41に表示する報知手段(制御手段70)とを備える。
(もっと読む)
表面形状測定装置
【課題】被測定物の表面形状を高い精度で測定し得る表面形状測定装置を提供する。
【解決手段】表面形状測定装置500は、被測定物600を支持する被測定物台510と、力感知部100と、力感知部100と被測定物600を互いに近づけるまたは遠ざけるために力感知部100と被測定物600を相対的にZ軸に沿って移動させるZ走査機構540と、Z軸に直交するX軸に沿って力感知部100と被測定物600を相対的に移動させるX走査機構520とを備えている。力感知部100は、被測定物600に近接されて被測定物600から力を受けるプローブを含み、このプローブが被測定物600から受ける力を感知する機能を有している。
(もっと読む)
てこ式検出器、スタイラス、及びスタイラス自動交換装置
【課題】てこ式検出器に対して複数種のスタイラスを交換する作業の負担を軽減でき、複数種のスタイラスを自動で交換できるてこ式検出器、スタイラスおよびスタイラス自動交換装置を提供する。
【解決手段】スタイラスホルダにスタイラス31を装着するため、ホルダの軸体36の中心軸に直交する方向にスタイラス本体33の長尺方向を合わせて、かつ軸体36の中心軸に直交する方向にスタイラス本体33に設けた着座板体34を移動させた場合に、この着座板体34に位置するスタイラス31全体の重心(重心軸)まで軸体36を案内する略U字状の切欠部を、当該着座板体34に形成する。切欠部によって軸体36が重心まで案内された状態で、板状揺動体37が着座板体34を着脱可能に保持する。
(もっと読む)
歯車測定方法
【課題】タッチ式プローブを用いて多点式連続測定ができ、従来の方法に比べて測定時間を短縮することができる歯車測定方法を提供する。
【解決手段】例えば、タッチ式プローブの測定子を、測定子の移動及びワーク(歯車)の回転を制御しワークWの理想歯形ライン、又は、演算によって求められた歯形ラインに沿って移動させるためのベース動作を行なうことに加えて、前記ベース動作中に、測定子をワークの歯面に当接させてタッチ式プローブからの第1信号(ON信号又はOFF信号)を受け取った後、測定子がワークの歯面に対し離間する方向へタッチ式プローブを移動させてタッチ式プローブからの第2信号(OFF信号又はON信号)を受け取るためのオシレーション動作を連続して行なう。
(もっと読む)
表面性状測定機
【課題】カムなどのカム面全周の表面粗さを効率的に測定できる表面性状測定機を提供。
【解決手段】被測定物を回転させる回転駆動装置と、検出器本体31およびこの検出器本体の先端に変位可能に設けられたスタイラス33を有する粗さ検出器30と、粗さ検出器を保持した検出器ホルダ50を駆動させる検出器駆動装置とを有する。粗さ検出器は、検出器本体の先端かつスタイラスの近傍に被測定物Wの測定面に接するスキッド37A,37Bを有する。検出器ホルダは、ガイド部材53Aと、粗さ検出器を保持するとともにガイド部材に対してスタイラスの変位方向へスライド可能に設けられたスライド部材53Bと、スキッドが被測定物の測定面に常時接するようにスライド部材を付勢する付勢手段とを含んで構成されている。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームのレンズ枠の形状を精度良く測定し、高カーブフレームの測定時に測定子がレンズ枠の溝から外れ難くする。
【解決手段】針状の先端形状を持つ測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸282を持ち、測定子軸282を測定子281の先端方向に傾斜可能に保持すると共に、測定子軸282をZ方向に移動可能に保持する測定子保持ユニットと、Z移動手段と、測定子のZ位置を検知するZ位置検知手段と、Z移動ユニットの駆動を制御する制御手段と、測定子保持ユニットのZ方向の位置情報及びZ位置検知手段の検知情報に基づいてレンズ枠の動径形状に対応するZ方向の形状を求める演算手段とを備える。
(もっと読む)
眼鏡枠形状測定装置
【課題】精度良くレンズ枠の形状を測定する。
【解決手段】針状の測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸を持つ測定子保持ユニットであって、測定子281の先端方向に測定子軸を移動可能に保持し、測定子保持ユニットと、XY移動手段と、測定子の先端のXY方向を変える回転手段と、測定子のXY位置検知手段と、XY移動手段及び回転手段の駆動を制御する制御手段と、測定子保持ユニットのXY方向の位置情報、回転手段の回転情報及びXY位置検知手段の検知情報に基づいてレンズ枠FWの動径情報を求める演算手段とを備え、制御手段はレンズ枠FWの測定途中では、レンズ枠FWの測定済みの動径情報に基づいて測定子保持ユニットを移動させるXY位置を決定してXY移動手段の駆動を制御する。
(もっと読む)
81 - 90 / 349
[ Back to top ]