
国際特許分類[G01C15/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | グループ1/00から13/00までに分類されない測量機器または付属具 (1,518)
国際特許分類[G01C15/00]の下位に属する分類
測点のマーク付のための手段 (441)
下げ振り (26)
固定角,例.直角,を設定するための器具 (1)
人工水平儀
国際特許分類[G01C15/00]に分類される特許
1,011 - 1,020 / 1,050
レーザスキャナ、ならびに光学式スキャンおよびレーザスキャナ環境の測定のための方法

【課題】光学的にレーザスキャナ10の環境をスキャンし、かつ測定するレーザスキャナを提供する。
【解決手段】このレーザスキャナは、測定ヘッドを含む。前記測定ヘッドは、光ビームLsを放出するための予め定められた伝送力Psを有する光トランスミッタ48を有し、少なくとも1つの軸の回りを回転可能である。放出された光ビームLsが、環境の対象物の測定ポイントで反射される。反射光ビームLrは、測定ヘッド12に含まれるレシーバ50によって、強度Irで受光される。伝送力Psを設定するための第1の手段44、48が、レシーバ50に割り当てられている。伝送力Psは、反射光ビームLrの強度Irの関数として調節可能である。さらにまた、測定ポイント32のグレースケール値GWeを測定するための第2の手段52が、レシーバ50に割り当てられている。第2の手段52は、伝送力Psの関数として調節可能である。
(もっと読む)
測量器のキャリブレーション
測量器をキャリブレートする方法が開示され、該測量器はベース要素とイメージセンサーを具備するカメラとを有しており、該カメラは前記ベース要素に関して固定されている垂直軸周りに回転可能であり且つ傾斜軸周りに回転可能であり、該傾斜軸は該垂直軸周りの該カメラの回転と共に該垂直軸周りに回転され、本方法においては、キャリブレーション点及び異なる面において捕獲されたイメージセンサー上のキャリブレーション点のイメージに関連するデータが使用され、前記キャリブレーション点の各々に対するデータは前記各キャリブレーション点と該測量器との間の距離を表わす距離データを有しており、且つ前記各キャリブレーション点のイメージの各々に対するデータは前記イメージセンサー上の前記各キャリブレーション点のイメージの位置を表わすイメージ位置データ及び該垂直軸周りの該傾斜軸の回転の水平角度及び該傾斜軸周りの該カメラの垂直傾斜角度を表わす配向データを有している。更に、該キャリブレーション点の各々に対する距離データ及び該キャリブレーション点のイメージの各々に対するイメージ位置及び配向データに基づいて、該測量器が、カメラの少なくとも1個の光学的特性及び該垂直軸及び該傾斜軸の相対的配向及び該ベース要素、該垂直軸、該傾斜軸のうちの1つと相対的なカメラの配向のうちの少なくとも1つを考慮に入れて同時的にキャリブレートされる。  (もっと読む)
(もっと読む)
目標とする空間を記録するための装置
光電式距離計を用いて、信号・所要時間の方法により目標とする空間を記録するための装置は、光信号、特にレーザー信号を送出するための送信器(S)と、目標とする空間内に有る物体によって反射された光信号、特にレーザー光線を受けるための受信器(E)とを備えている。更に、送信器(S)と受信器(E)の光軸を、有利には二つの直交する方向の間で偏向させるための走査器が配備されている。送信器(S)と受信器(E)の光軸は、ほぼ平行に延びる。更に、送出した光信号の所要時間又は位相位置から、距離値を算出して、この距離値と走査器の光線の偏向角とから個々のデータ要素の空間座標を得るための評価機器が有る。この装置は、架台(21,22,24)の中空軸(33,34)を用いて軸支されている回転する測定ヘッド(8)と、中空軸(33,34)に対して軸方向に入射する光線を半径方向に偏向可能とするとともに、その逆も可能とする、測定ヘッド(8)に対して固定して配置されたミラー機器(41,42)とを備えている。位置を固定して配置された送信器(S)の光線を、中空軸(33,34)に対して軸方向に誘導することが可能であるとともに、ミラー機器(41,42)によって、半径方向に送出することが可能である。それに対して、目標とする空間内に有る物体によって反射された光線を、ミラー機器(41,42)によって、中空軸(8,33,34)の軸の方向に偏向することが可能であるとともに、同じく位置を固定して配置された受信器(E)に供給することが可能である。  (もっと読む)
(もっと読む)
測地機器の現在位置を決定する方法と装置
位置決めシステムから発信される信号がシャドウされているデッドレンジ(T)内における測地機器の現在位置(A)を決定するために、二つの基準構造(5)が少なくとも二つの既知の位置から検出され、基準構造(5)に関連する距離が測定される。この距離測定と連結した画像情報が捕捉される。この情報は基準構造(5)の配置に関するデータを含む。デッドレンジ(T)内の位置からの基準構造(5)の続いて起こる捕捉から、現在位置(A)が導出される。基準構造(5)を同定し、測定するために、画像処理方法が有利に用いられる。  (もっと読む)
(もっと読む)
携帯型測定装置の空間位置の決定方法とシステム

【課題】測定装置(4b)の実際の位置及び/又は実際の方位に関する。
【解決手段】レーザー光線で走査される空間セグメント(5’)上の少なくとも二つの参照ポイント(2b’)がその間の距離と、傾斜角に関して検出され測定される。測定装置(4b)の実際の位置は、検出可能で距離と傾斜角とに関連付けて設けられた前記参照ポイント(2b’)の既知の位置より算出することができる。参照ポイントの検出、監視、測定は測定装置(4b)によって自動的に行われる。前記測定装置(4b)と参照ポイント(2b’)と関連して特に統合された構成部材とは、局所位置決め及び/又は方位測定システムを構成する。本発明に係る方法と対応する装置は、他の測定システムでは接近できない領域においてさえも、測定が問題なく自動的に実行されることを可能にする。
(もっと読む)
画素
【課題】距離計と測量アプリケーション間の通信を確実に行う方法に関する。
【解決手段】本発明を実行するために用いられるシステムは、測量用アプリケーション(2a)を実行するためのコンピュータ装置(1a)と、対象物(4a)までの距離を測定し、測量アプリケーションが処理可能な形式の距離測定値を記録するための距離測定部と、距離計と測量用アプリケーション(2a)間の通信のためのコンピュータ装置(1a)との無線通信リンク(6a)を備えた遠隔制御部とからなる。前記方法は、距離計が制御する距離測定値を測定し記録し、測量用アプリケーション(2a)が処理できるような変数に変換し、距離計と測量用アプリケーション(2a)間の遠隔制御部を経由した通信により、測定した距離測定値を測量用アプリケーション(2a)へ送信するステップからなる。上記ステップは、異なる順序でも実行可能である。本発明は、距離測定部、無線通信リンク(6a)のための遠隔制御部、特に表示手段(8a)と入力手段(13a)が共通のハウジング(12a)内に設けられた携帯型距離計(20a)にも関する。
(もっと読む)
レーザー光源を備える測地線装置
マルチモードの放射を発光するレーザーダイオード(2b)がモード選択部(2d)により、レーザー光源(2)に発光されたレーザー放射を単一モードの特性を有するように作用することで、レーザー光の発光が改良されるようなレーザー光源(2)が、接地線装置(1)に使用される。外部空洞共振器に端部発光器(2b)あるいは縦半導体発光器が使用され、モード選択共振器の効果を有する単一モードファイバーあるいは共振器ミラーがモード選択部(2d)がとして配置される。負の分散を有する部品が、長くなった空洞共振器により発生された長いパルス持続時間を補償するためにパルス圧縮に使用される。  (もっと読む)
(もっと読む)
調査する目標物の方向の測定方法
【課題】本発明は、目標物のパターン6の画像4を記録して、目標物への方向を測定する。
【解決手段】目標物の急速な位置変化に、測定の最適な安定性を実行するために、現在の画像センサの機能を用いて、得られるピクセルの一部のみを計算する。計算する画像情報の選択は、要求される測定精度および画像センサの時間動作に関する情報を使用する。本発明では、取得する情報の制限は、サブサンプリングとサブウィンドウの組合せを用いた画像4の一部領域7bの選択で実行できる。画像4の一部領域7aに表示される画像のピクセルの一部を省略する。
(もっと読む)
自己補償レーザトラッカ
例えばレーザに基づく座標測定装置、レーザトラッカ、又はその他の座標測定装置であり得る座標測定装置を補償する装置及び方法が提供される。一つの例示的な方法では、そのような補償は、埋め込まれたトラッカターゲットによるペイロードパラメータの自己補償を包含する。別の例示的な実施形態では、そのような補償は、埋め込まれた温度センサによるペイロード、アジマスポスト、軸、又はR0パラメータの自己補償を包含する。 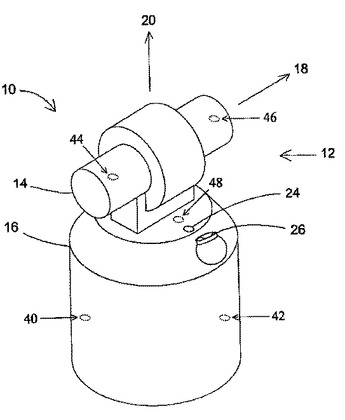 (もっと読む)
(もっと読む)
空間的シフトキー(SSK)変調シグネチャーを使用して姿勢を決定するシステム及び方法
三次元空間を通して所定の仕方で移動する放射手段を備え、送信信号にサイクリックなドップラーが重畳されるようにし、三次元空間を通して所定の仕方で移動する受信手段を通して前記送信信号を受信し、その受信信号にサイクリックなドップラーが重畳されるようにし、前記受信したサイクリックなドップラーを解釈することで前記放射手段に対する前記受信手段の相対的移動を分析し、そして前記解釈されたドップラーに基づいて姿勢を決定する姿勢システム。或いは又、三次元空間における受信手段の移動を調整して、受信信号に重畳されるサイクリックなドップラーを最小にし、そして受信手段及び放射手段を整列状態にもっていくに必要な調整に基づいて姿勢を決定する。  (もっと読む)
(もっと読む)
1,011 - 1,020 / 1,050
[ Back to top ]