
国際特許分類[G01C15/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | グループ1/00から13/00までに分類されない測量機器または付属具 (1,518)
国際特許分類[G01C15/00]の下位に属する分類
測点のマーク付のための手段 (441)
下げ振り (26)
固定角,例.直角,を設定するための器具 (1)
人工水平儀
国際特許分類[G01C15/00]に分類される特許
11 - 20 / 1,050
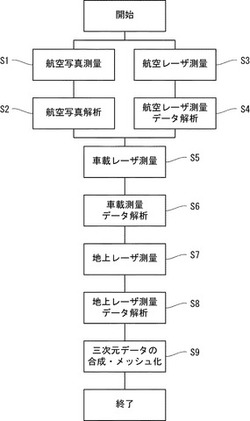
三次元モデルの作成方法
【課題】
実際の地形および地物の形状を精度良く再現する三次元モデルの作成方法を提供する。
【解決手段】
本発明の三次元モデルの作成方法は、デジタルカメラ、GPSおよびIMUを搭載した飛行体により地上の航空写真を撮影する工程と、レーザスキャナ、GPSおよびIMUを搭載した飛行体により地物1および地形2を測量する工程と、レーザスキャナ、GPS、IMU、デジタルカメラおよびオドメータを搭載した車両により地物1および地形2を測量する工程と、地上型レーザスキャナにより地物1および地形2を測量する工程と、上記各測量の測量データを解析し、それぞれの三次元データを取得する工程と、各三次元データの合成及びメッシュ化を行う工程と、を含む。
(もっと読む)
傾斜計

【課題】水平方向に延びる孔の傾斜測定を容易にする傾斜計を提供することを課題とする。
【解決手段】ボアホール100内を移動可能な傾斜計101は、本体10と、本体10を自走させる第一走行輪11a及び第二走行輪12aと、本体10の傾斜量を検出する二軸傾斜センサ32と、本体10の移動量を検出するX軸回転数センサ24及び26並びにY軸回転数センサ23及び25とを備える。なお、X軸回転数センサ24及び26はそれぞれ、第一走行輪11a及び第二走行輪12aのX軸回りの方向の回転移動量を検出し、Y軸回転数センサ23及び25はそれぞれ、第一走行輪11a及び第二走行輪12aのY軸回りの方向の回転移動量を検出する。
(もっと読む)
鋼管の建入れ誤差の測定システム、鋼管の建入れ誤差の測定方法、及び逆打ち支柱の建入れ方法
【課題】鋼管の建入れ誤差の測定に使用する装置の設置作業を容易にすると共に、鋼管の建入れ姿勢を修正しながらの建入れ誤差の測定を可能にする。
【解決手段】地盤に建入れられた逆打ち支柱10の建入れ誤差を、逆打ち支柱10の内部に設けられたターゲット50の位置に基づいて測定するシステム10であって、逆打ち支柱10の頭部に、ターゲット50を撮影するように設置されたカメラ110と、逆打ち支柱10の頭部に設置された傾斜計120と、カメラ110の撮像情報に基づいてターゲット50の位置を抽出し、傾斜計120の計測値に基づいてカメラ110の光軸112の鉛直軸に対する傾斜角度を算出し、算出した傾斜角度に基づいてターゲット50の位置を補正するコンピュータ130とを備える。
(もっと読む)
レーザーセンサ用墨出し器
【課題】作業者一人でも、レーザー光の位置に合わせた状態を保持しながら、壁面等への墨付け作業を正確に行うことができるレーザーセンサ用墨出し器を提供する。
【解決手段】受光センサ部11がレーザー水準器から照射されたレーザー光Pを受光すると光または音が反応するレーザーセンサ10を設ける。レーザーセンサ10に墨付けスタンプ20を装着する。墨付けスタンプ20は、レーザー光Pの線に沿った位置に確認用線Qが捺印する。墨付けスタンプ20をレーザーセンサ10の受光センサ部11に併設する。受光センサ部11で感知するレーザー光Pの延長線上に前記確認用線Qを捺印する。
(もっと読む)
移動距離計測装置及び撮影カメラ
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で移動距離を計測できる移動距離計測装置を提供する
【解決手段】カメラデータ計測装置100は、パン方向、チルト方向及びヨー方向の角速度を計測するジャイロセンサ10と、3次元方向の加速度を計測する加速度センサ20と、移動面を向くように、移動面の動画像である移動面動画像を撮影するセンサカメラ30と、センサカメラ30が撮影した移動面動画像から動きベクトルを検出する画像処理部40と、姿勢データを算出する姿勢データ算出部51と、動きベクトルの大きさを、センサカメラ30の撮影範囲での移動距離に換算する移動距離算出部53とを備える。
(もっと読む)
レーザベースの位置合わせツール
【課題】位置合わせのインジケーションを投影するための好適な装置および方法を提供すること。
【解決手段】
本発明は、第1の出力ビームと、第1の出力ビームに対して実質的に垂直である第2の出力ビームとを形成することを特徴とする。第1の出力ビームは水平を示し、第2の出力ビームは鉛直を示し、第1および第2の出力ビームは合わせて直角を示す。本発明はさらに、水平および鉛直方向の精度が損なわれるほどに、装置が傾斜したときに指示を出す、エラーインジケータと、該エラーインジケータを無効化し、それによって、出力ビームが少なくとも直角の位置合わせを示すために使用され得る、オーバーライドとを特徴とする。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
液状化に伴う変状箇所検出支援装置及び液状化に伴う変状箇所検出支援プログラム
【課題】液状化現象により地中に生じた空洞の位置を正確に推定することができる液状化に伴う変状箇所検出支援装置及び液状化に伴う変状箇所検出支援プログラムを提供する。
【解決手段】計測結果取得部40が、レーザスキャナの計測結果である高さ情報を取得すると、勾配演算部42が、計測結果取得部40が取得した高さ情報に基づき、地表面の勾配を演算する。凹所部検出部44は、勾配演算部42の演算結果に基づき、平面状の底面と、その底面の周囲を包囲する、底面より大きな勾配を有する周囲壁とで形成された凹所部を検出する。空洞部推定部46は、上記凹所部検出部44が検出した、液状化現象に特徴的な形状の凹所部を検出し、この凹所部に基づいて地面中の空洞部の存在を推定する。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
建物抽出装置、方法及びプログラム
【課題】
3次元点群データから迅速に建物の形状を抽出する。
【解決手段】
3次元点群データから不規則三角網を生成し(S12)、各三角網について法線ベクトルを算出する(S13)。法線ベクトルをグリッド化し(S14)、所定方向範囲内で同一方向のものをグループ化し(S15)、大きさを正規化する(S15)。地面に対して所定の誤差範囲内で平行な法線ベクトルを有するグリッドで構成される面から建物の輪郭線を抽出し(S17,S18)、輪郭線に標高値を付与する(S19)。輪郭線で決定される形状を三次元ベクトル化する(S20)。
(もっと読む)
11 - 20 / 1,050
[ Back to top ]